Toyota Sequoia (2005). Manual — part 592
I28198
I28199
I28200
I28201
I28202
–
DIAGNOSTICS
NAVIGATION SYSTEM
DI–2163
2357
(4)
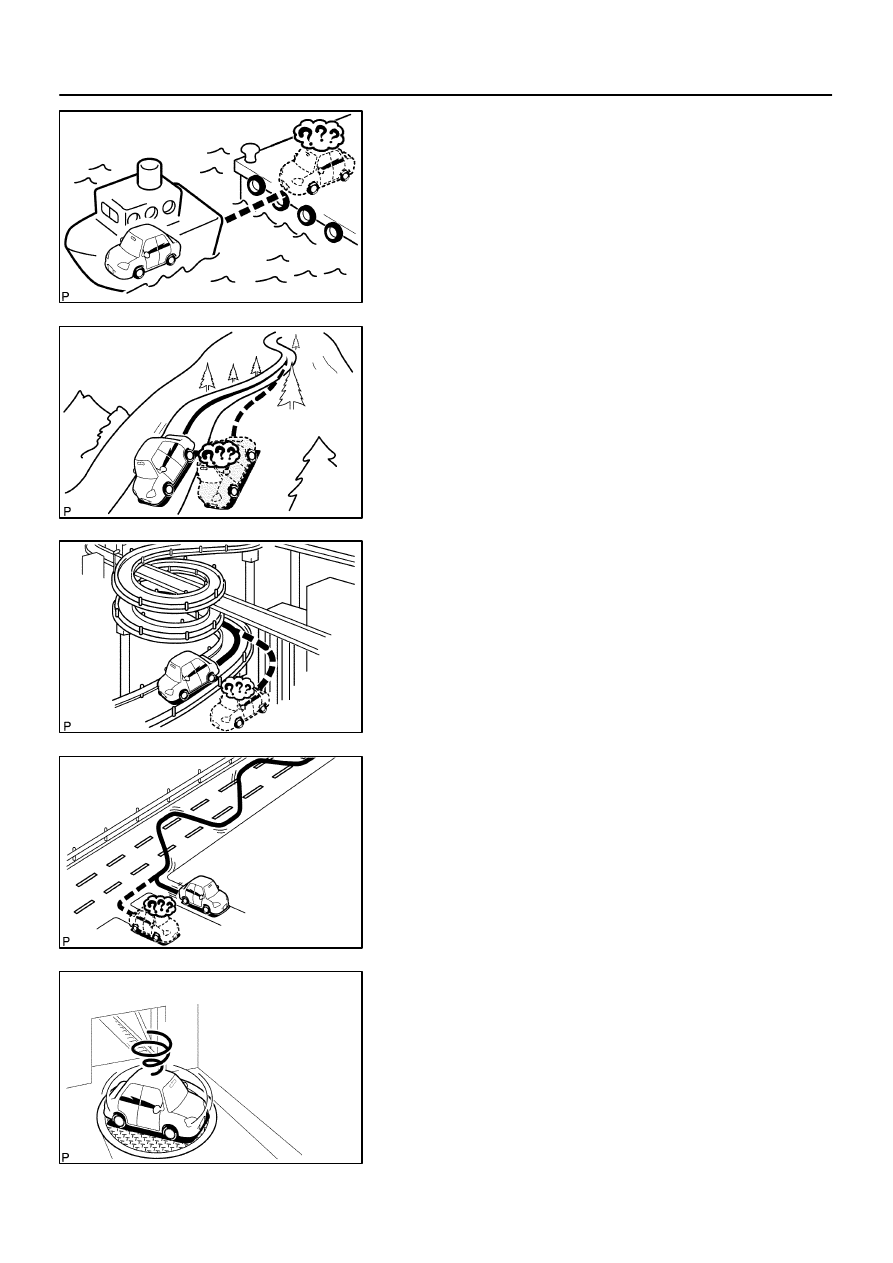
When the vehicle is carried, such as on a ferry, and
the vehicle itself is not running, the current vehicle
position mark may be displayed in the position
where the vehicle was until a measurement can be
performed by GPS.
(5)
When the vehicle runs on a steep hill, the current ve-
hicle position mark may deviate from the correct
position.
(6)
When the vehicle makes a continuous turn of 360,
720, 1,080, etc. degrees, the current vehicle posi-
tion mark may deviate from the correct position.
(7)
When the vehicle moves erratically, such as
constant lane changes, the current vehicle position
mark may deviate from the correct position.
(8)
When the ignition switch is turned to the ACC or ON
position on a turntable before parking, the current
vehicle position mark may not point in the correct
direction. The same will occur when the vehicle
comes out of parking.
I28203
I28204
I28187
Radio and Display Assy
Navigation ECU
Radio and Navigation Assy
DI–2164
–
DIAGNOSTICS
NAVIGATION SYSTEM
2358
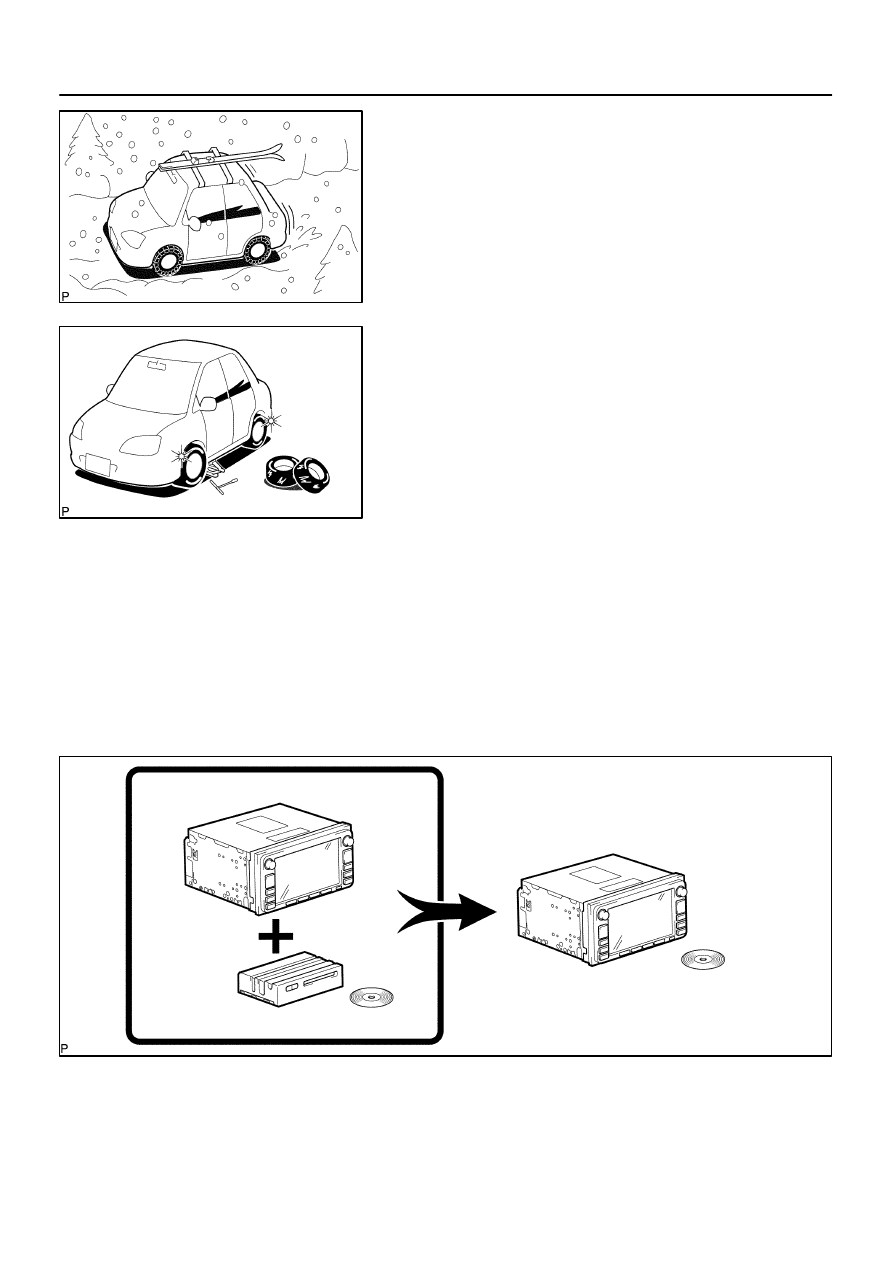
(9)
When the vehicle runs on the snowy road or a
mountain path with the chains installed or using a
spare tire, the current vehicle position mark may
deviate from the correct position.
(10) When a tire is changed, the current vehicle position
mark may deviate from the correct position.
HINT:
Diameter of the tire may change, causing a speed sensor
error.
Performing the ”tire change” in calibration mode will allow
the system to correct the current vehicle position faster.
2.
Radio and navigation assy outline
Conventionally, 2 separate devices, a ”radio and display assy” and a ”navigation ECU” are used. This model
has adopted a new type, combining these devices into a single unit.
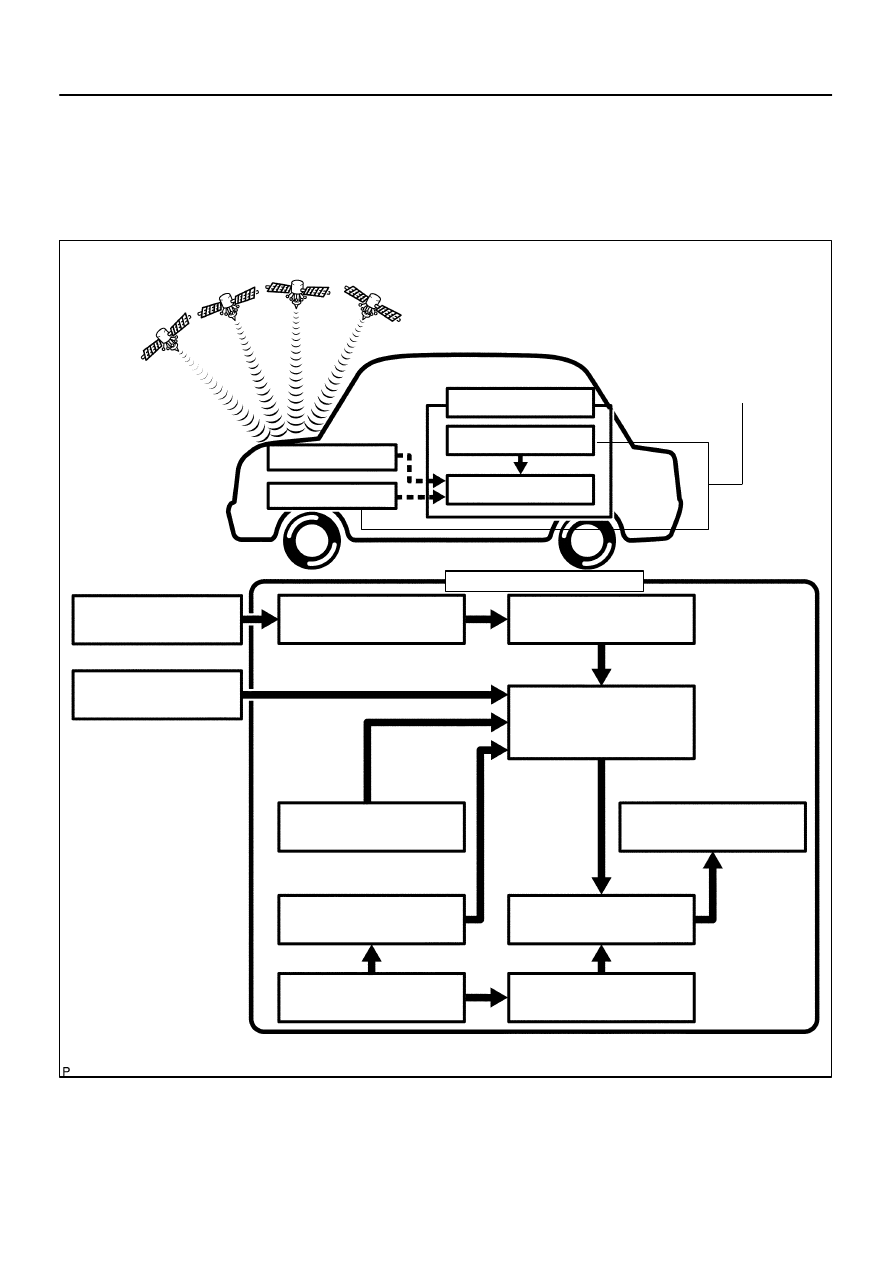
I28188
GPS satellite
Navigation
Gyro Sensor
ECU
GPS Antenna
Receive satellite
radio wave
GPS correction
Create the current
vehicle position
tracking data
Navigation screen
Map disc
Map matching
correction
Detect direction
change
Detect vehicle
running distance
Radio and Navigation Assy
Detect the
measurement position
Map scrolling
Map scale switching
Map and current vehicle
position data processing
Vehicle Speed Sensor
GPS Antenna
Vehicle Speed Sensor
Location by
GPS navigation
Gyro Sensor
Location by
autonomous navigation
–
DIAGNOSTICS
NAVIGATION SYSTEM
DI–2165
2359
3.
Navigation system outline
(a)
Vehicle position tracking methods
It is essential that the navigation system correctly tracks the current vehicle position and displays it on
the map. There are 2 methods to track the current vehicle position: autonomous (dead reckoning) and
GPS* (satellite) navigation. Both navigation methods are used in conjunction with each other.
*GPS (Global Positioning System)
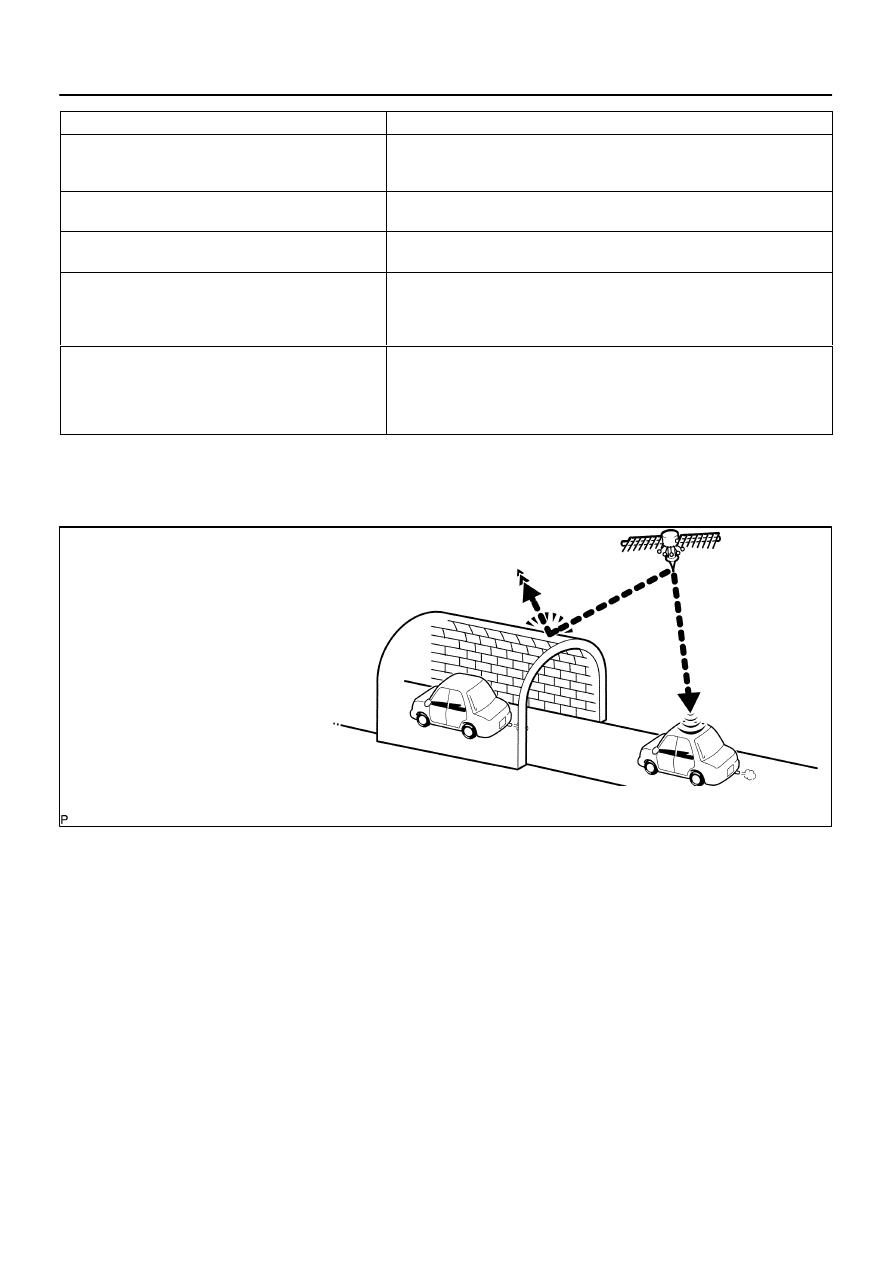
I28189
Navigation performed even where the
GPS radio wave does not reach.
In a tunnel
In an indoor parking lot
Between tall buildings
Under an overpass
On a forest or tree–lined path
Autonomous navigation
Autonomous navigation and
GPS navigation
GPS satellite
DI–2166
–
DIAGNOSTICS
NAVIGATION SYSTEM
2360
Operation
Description
Vehicle Position Calculation
The navigation ECU calculates the current vehicle position (direction and current
position) using the direction deviation signal from the gyro sensor and the running
distance signal from the vehicle speed sensor and creates the driving route.
Map Display processing
The navigation ECU displays the vehicle track on the map by processing the ve-
hicle position data, vehicle running track, and map data from the map disc.
Map Matching
The map data from the map disc is compared to the vehicle position and running
track data. Then, the vehicle position is matched with the nearest road.
GPS Correction
The vehicle position is matched to the position measured by GPS. Then, the mea-
surement position data from the GPS unit is compared with the vehicle position and
running track data. If the position is widely different, the GPS measurement position
is used.
Distance Correction
The running distance signal from the vehicle speed sensor includes the error
caused by tire wear and slippage between the tires and road surface. Distance
correction is performed to account for this. The navigation ECU automatically off-
sets the running distance signal to make up for the difference between it and the
distance data of the map. The offset is automatically updated.
HINT:
The combination of autonomous and GPS navigation makes it possible to display the vehicle position even
when the vehicle is in places where the GPS radio wave cannot receive a signal. When only autonomous
navigation is used, however, the mapping accuracy may slightly decline.
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст