Infiniti M35/M45 Y50. Manual — part 1059
AUTOMATIC DRIVE POSITIONER
SE-33
C
D
E
F
G
H
J
K
L
M
A
B
SE
24
W
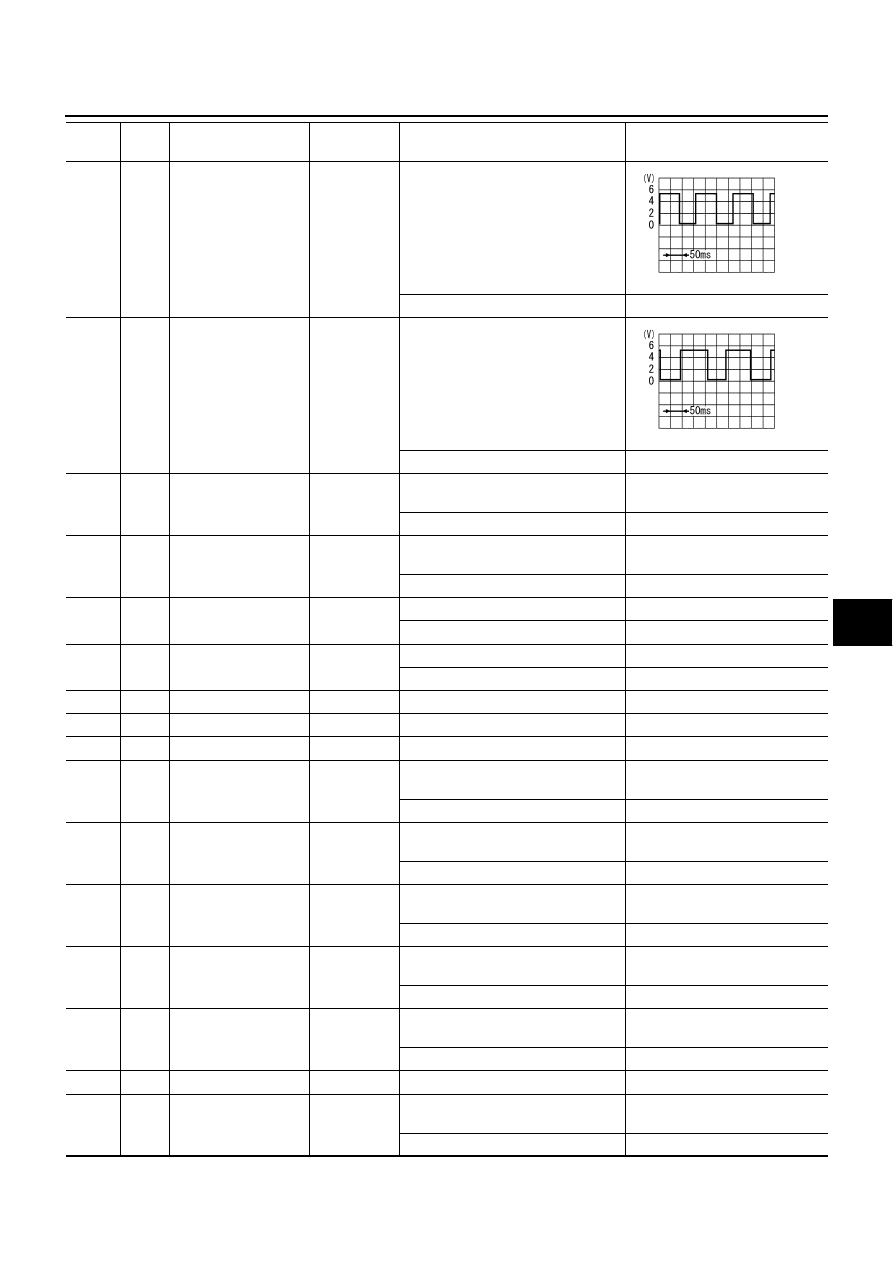
Seat sliding
sensor signal
Input
ON (seat sliding motor operation)
Other than above
0 or 5
25
W/Y
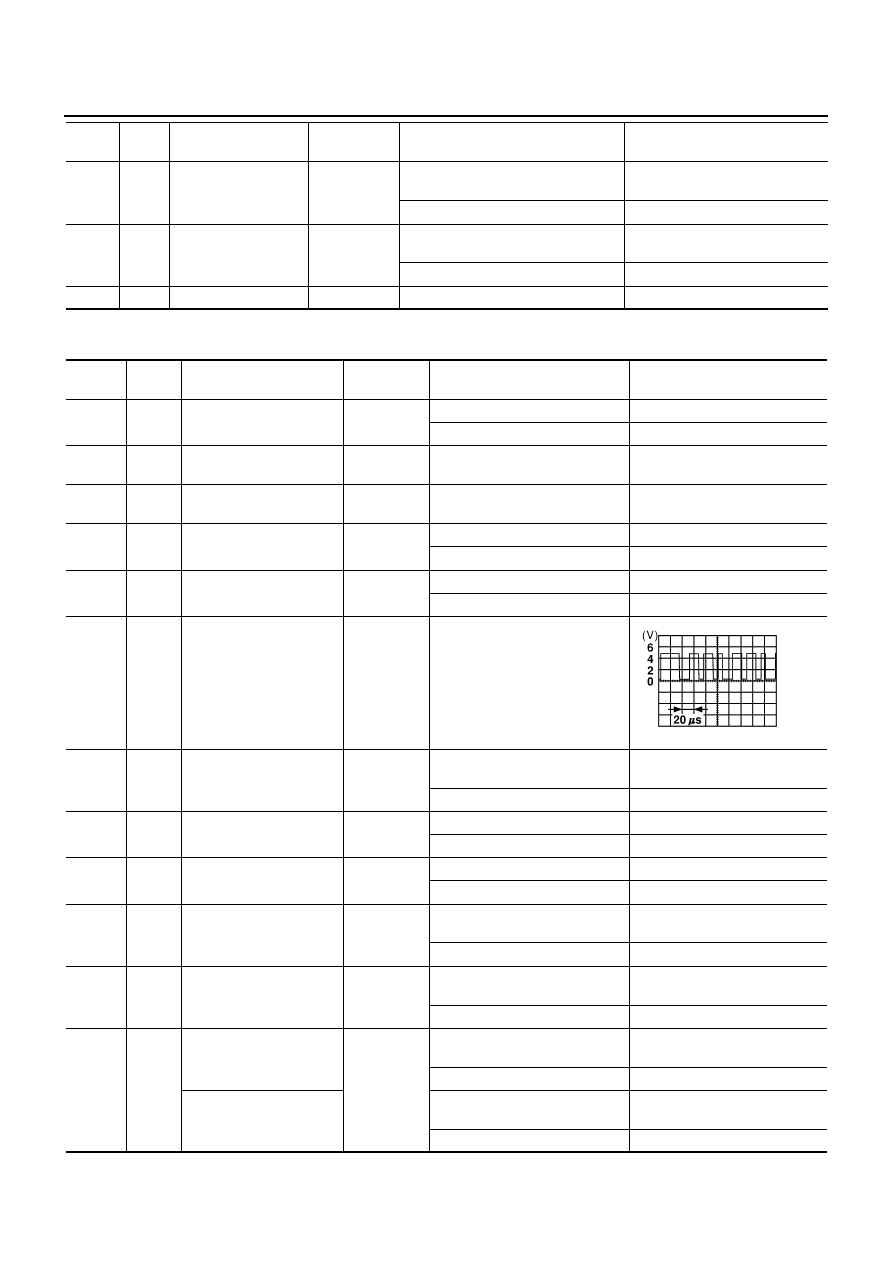
Front lifting
sensor signal
Input
ON (front lifting motor operation)
Other than above
0 or 5
26
R/B
Seat sliding switch
forward signal
Input
ON
(seat sliding switch forward operation)
0
Other than above
Battery voltage
27
G/B
Seat reclining switch
forward signal
Input
ON (seat reclining switch forward
operation)
0
Other than above
Battery voltage
28
Y/B
Front lifting switch
UP signal
Input
ON (front lifting switch UP operation)
0
Other than above
Battery voltage
29
L/B
Rear lifting switch
UP signal
Input
ON (rear lifting switch UP operation)
0
Other than above
Battery voltage
31
B/W
Sensor ground
—
—
0
32
W/B
Ground (signal)
—
—
0
33
W
Power source (C/B)
Input
—
Battery voltage
35
R/W
Sliding motor
forward signal
Output
Sliding switch forward operation
(Motor operated)
Battery voltage
Other than above
0
36
G/W
Reclining motor
forward signal
Output
Reclining switch forward operation
(Motor operated)
Battery voltage
Other than above
0
37
Y/W
Front lifting motor
DOWN signal
Output
Front lifting switch down operation
(Motor operated)
Battery voltage
Other than above
0
38
L/B
Rear lifting motor
UP signal
Output
Rear lifting switch up operation
(Motor operated)
Battery voltage
Other than above
0
39
L/W
Rear lifting motor
DOWN signal
Output
Rear lifting switch down operation
(Motor operated)
Battery voltage
Other than above
0
40
R/B
Power source (Fuse)
Input
—
Battery voltage
42
R/B
Sliding motor
backward signal
Output
Sliding switch backward operation
(Motor operated)
Battery voltage
Other than above
0
Termi-
nal
Wire
color
Item
Signal
Input/Output
Condition
Voltage (V)
(Approx)
SIIA0690J
SIIA0691J
SE-34
AUTOMATIC DRIVE POSITIONER
Terminals and Reference Values for Automatic Drive Positioner Control Unit
NIS0025Z
44
G/B
Reclining motor
backward signal
Output
Reclining switch backward operation
(Motor operated)
Battery voltage
Other than above
0
45
Y/B
Front lifting motor
UP signal
Output
Front lifting switch upward operation
(Motor operated)
Battery voltage
Other than above
0
48
B
Ground (power)
—
—
0
Termi-
nal
Wire
color
Item
Signal
Input/Output
Condition
Voltage (V)
(Approx)
Termi-
nal
Wire
color
Item
Signal
Input/Output
Condition
Voltage (V)
(Approx)
1
Y
Tilt switch UP signal
Input
Tilt switch is UP operation
0
Other than above
5
5
L/R
Mirror sensor (RH vertical)
signal
Input
When mirror motor RH is UP or
DOWN operation
Changes between 4.2 (close to
perk) 0.5 (close to valley)
6
LG
Mirror sensor (LH vertical)
signal
Input
When mirror motor LH is UP or
DOWN operation
Changes between 4.2 (close to
perk) 0.5 (close to valley)
7
L
Tilt sensor signal
Input
Tilt position: Top
1
Tilt position: Bottom
3.8
9
LG
Memory switch 1 signal
Input
Memory switch 1 ON
0
Other than above
5
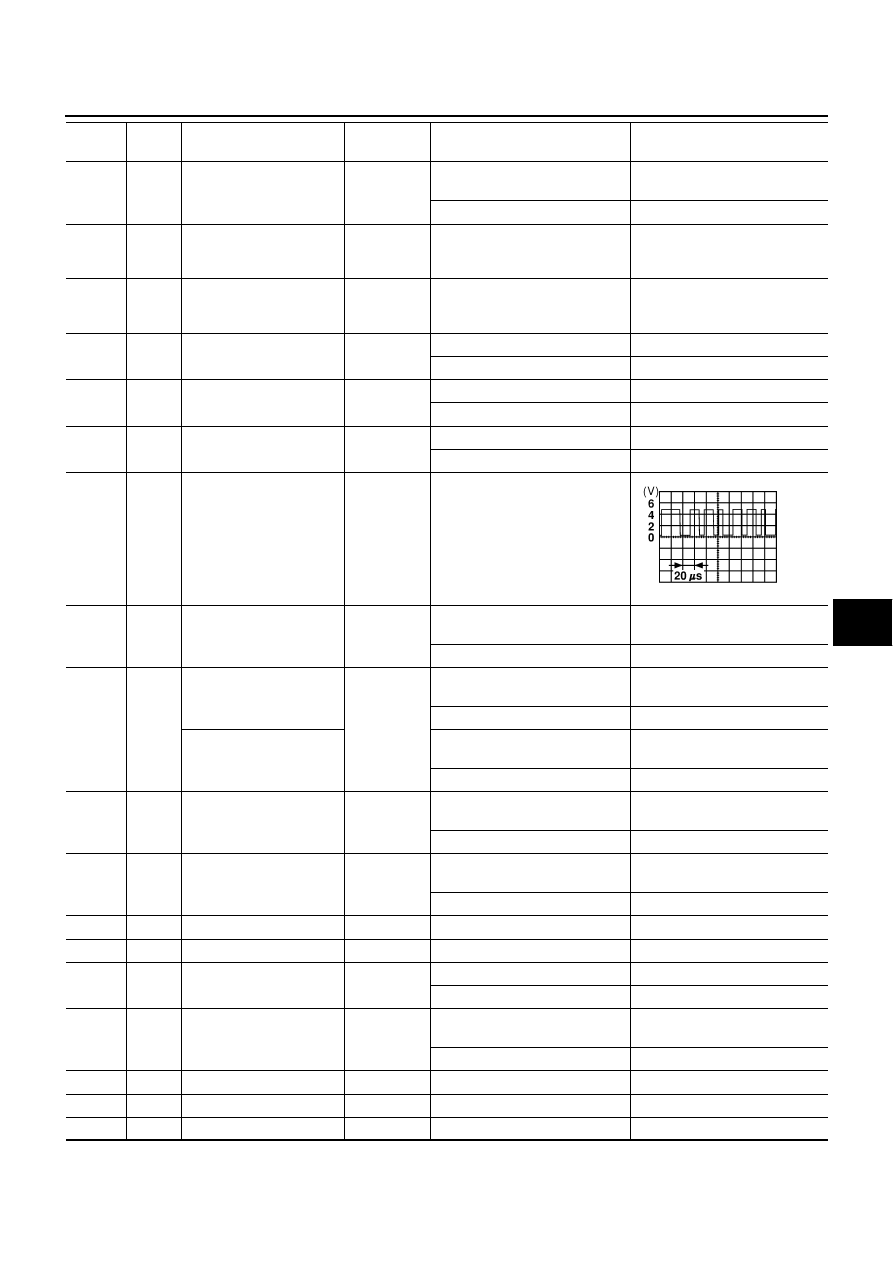
10
O
UART LINE (TX)
Output
Tilt switch operated
11
R
Telescopic switch forward
signal
Input
When telescopic switch is
forward operation
0
Other than above
5
12
R/G
Memory switch indictor 1
signal
Input
When illuminate indictor 1
1
Other than above
Battery voltage
13
P
Memory switch indictor 2
signal
Input
When illuminate indictor 2
1
Other than above
Battery voltage
14
L
Mirror motor RH UP signal
Output
When mirror motor RH UP oper-
ation
Battery voltage
Other than above
0
15
G
Mirror motor RH LEFT
signal
Output
When mirror motor RH LEFT
operation
Battery voltage
Other than above
0
16
W/L
Mirror motor LH DOWN
signal
Output
When mirror motor LH DOWN
operation
Battery voltage
Other than above
0
Mirror motor LH RIGHT
signal
When mirror motor LH RIGHT
operation
Battery voltage
Other than above
0
SKIA0175E
AUTOMATIC DRIVE POSITIONER
SE-35
C
D
E
F
G
H
J
K
L
M
A
B
SE
17
LG
Tilt switch DOWN signal
Input
When tilt switch is DOWN
position
0
Other than above
5
21
SB
Mirror sensor
(RH horizontal) signal
Input
When mirror motor RH is LEFT
or RIGHT operation
Changes between 3.5 (close to
left edge) 0.5 (close to right
edge)
22
O/L
Mirror sensor
(LH horizontal) signal
Input
When mirror motor LH is LEFT or
RIGHT operation
Changes between 0.5 (close to
left edge) 3.5 (close to right
edge)
23
GR
Telescopic sensor input
Input
Telescopic position: Top
4.6
Telescopic position: Bottom
0.4
24
BR/W
Set switch signal
Input
Set switch ON
0
Other than above
5
25
LG/B
Memory switch 2 signal
Input
Memory switch 2 ON
0
Other than above
5
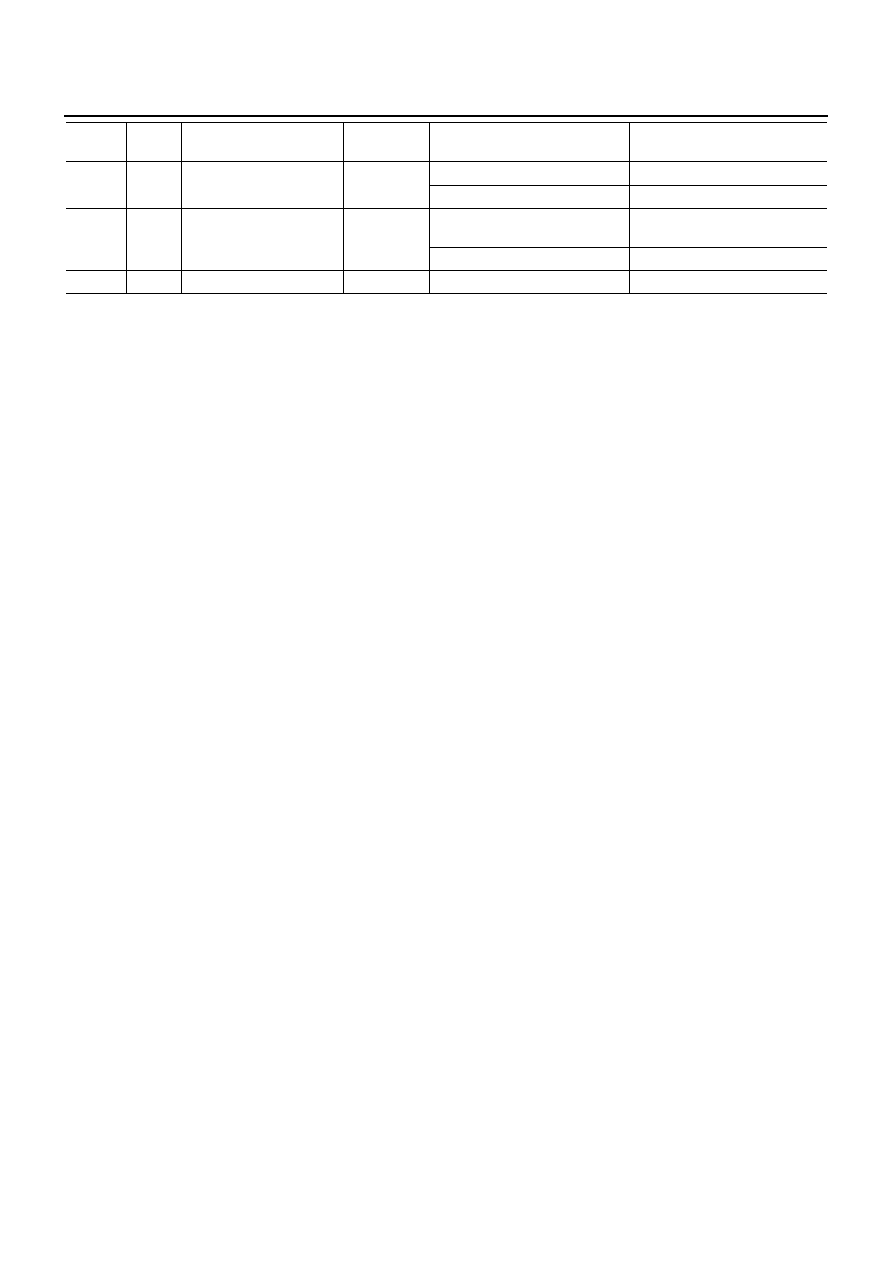
26
P
UART LINE (RX)
Input
Tilt switch is operated
27
W
Telescopic switch
backward signal
Input
Telescopic switch turned to
backward
0
Other than above
5
30
GR
Mirror motor RH DOWN
signal
Output
When mirror motor RH DOWN
operation
Battery voltage
Other than above
0
Mirror motor RH RIGTH
signal
When mirror motor RH RIGHT
operation
Battery voltage
Other than above
0
31
BR
Mirror motor LH UP signal
Output
When mirror motor LH UP
operation
Battery voltage
Other than above
0
32
V
Mirror motor LH LEFT
signal
Output
When mirror motor LH LEFT
operation
Battery voltage
Other than above
0
33
W
Sensor power supply
Input
—
5
34
R
Power source (Fuse)
Input
—
Battery voltage
35
LG
Tilt motor UP signal
Output
Tilt switch is UP operation
Battery voltage
Other than above
0
36
P
Telescopic motor forward
signal
Output
Telescopic switch is forward
operation
Battery voltage
Other than above
0
39
L
Power source (C/B)
Input
—
Battery voltage
40
B
Ground
—
—
0
41
Y
Sensor ground
—
—
0
Termi-
nal
Wire
color
Item
Signal
Input/Output
Condition
Voltage (V)
(Approx)
SKIA0175E
SE-36
AUTOMATIC DRIVE POSITIONER
42
G
Tilt motor DOWN signal
Output
Tilt switch is DOWN operation
Battery voltage
Other than above
0
44
G
Telescopic motor
backward signal
Output
Telescopic switch is backward
operation
Battery voltage
Other than above
0
48
B
Ground
—
—
0
Termi-
nal
Wire
color
Item
Signal
Input/Output
Condition
Voltage (V)
(Approx)
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст