Mazda Training manual — part 84
Dynamic Driving Safety Systems
Fundamentals
Traction Control System
•
Critical driving situations can occur not only during braking, but also while driving,
cornering, starting off, and accelerating (especially on wet or slippery roads). These
situations can make it difficult for the driver to react correctly, and can cause the vehicle
to become unstable.
•
The TCS helps to solve these problems by avoiding / reducing wheel spin. This is
achieved either by reducing the engine torque by sending a corresponding signal to the
PCM
(Powertrain Control Module) and / or by applying brakeforce to the spinning
wheel(s).
•
The TCS is incorporated to some ABS Hydraulic Unit/Control Module by minor changes
to the basic system, but is also integrated to all DSC systems installed on Mazda
vehicles.
•
Depending on the vehicle, different strategies may be used for the operation of the TCS.
The most common is that, when the control module recognizes that the wheel speed of
the driven wheels exceeds the wheel speed of the other wheels by a specified value, a
signal is sent to the PCM to reduce the engine torque. The PCM accordingly reduces the
engine torque output by closing the throttle valve (only on vehicles with electronic throttle
valve), adjusting the ignition timing, and / or by cutting fuel off. If the wheel spin still
exceeds the limit or if the speed of one wheel exceeds the wheel speed of the other
driven wheel by a specified value, brake force is applied by the hydraulic unit to the
corresponding wheel(s).
NOTE:
TCS does not completely avoid wheel spin, it operates only above a specified limit of
wheel spin.
Curriculum Training
01-15

Fundamentals
Dynamic Driving Safety Systems
L2003_01012
1 RF wheel
8 Powertrain control module
2 RR wheel
9 Signal for torque reduction
3 LR wheel
10 ABS/TCS HU/CM
4 LF wheel
11 Applied brake fluid pressure
5 Transmitted torque
12 Brake calliper
6 Engine with transmission
13 Differential
7 Engine
control
01-16 Curriculum
Training
Dynamic Driving Safety Systems
Fundamentals
Dynamic Stability Control
•
Due to external circumstances, such as an obstacle on the road, wet or slippery roads,
or driving at inappropriate vehicle speed, a vehicle can reach critical limits, where the
driver cannot keep the vehicle under control anymore.
•
The DSC improves vehicle handling and stability in these critical situations. A vehicle’s
driving direction can be controlled by either turning the steering wheel or by a yaw
moment built up by applying brake force to one wheel. The driver uses the steering
wheel, whereas the DSC uses the brake system to control the vehicles driving direction.
•
The DSC constantly monitors the vehicle’s movement, not only the speed, but also the
yaw rate, the lateral acceleration, and the steering angle. The control module calculates
the direction the driver wants to drive to by using the steering angle. This is compared to
the actual vehicle speed, the vehicle’s yaw rate, and lateral acceleration. If a critical
situation is detected, the DSC accordingly applies controlled brakeforce and reduces the
engine torque output as required (in the same way as for TCS operation), to ensure that
the vehicle follows the desired direction.
•
The DSC uses an advanced ABS HU/CM and additional sensors.
Curriculum Training
01-17
Fundamentals
Dynamic Driving Safety Systems
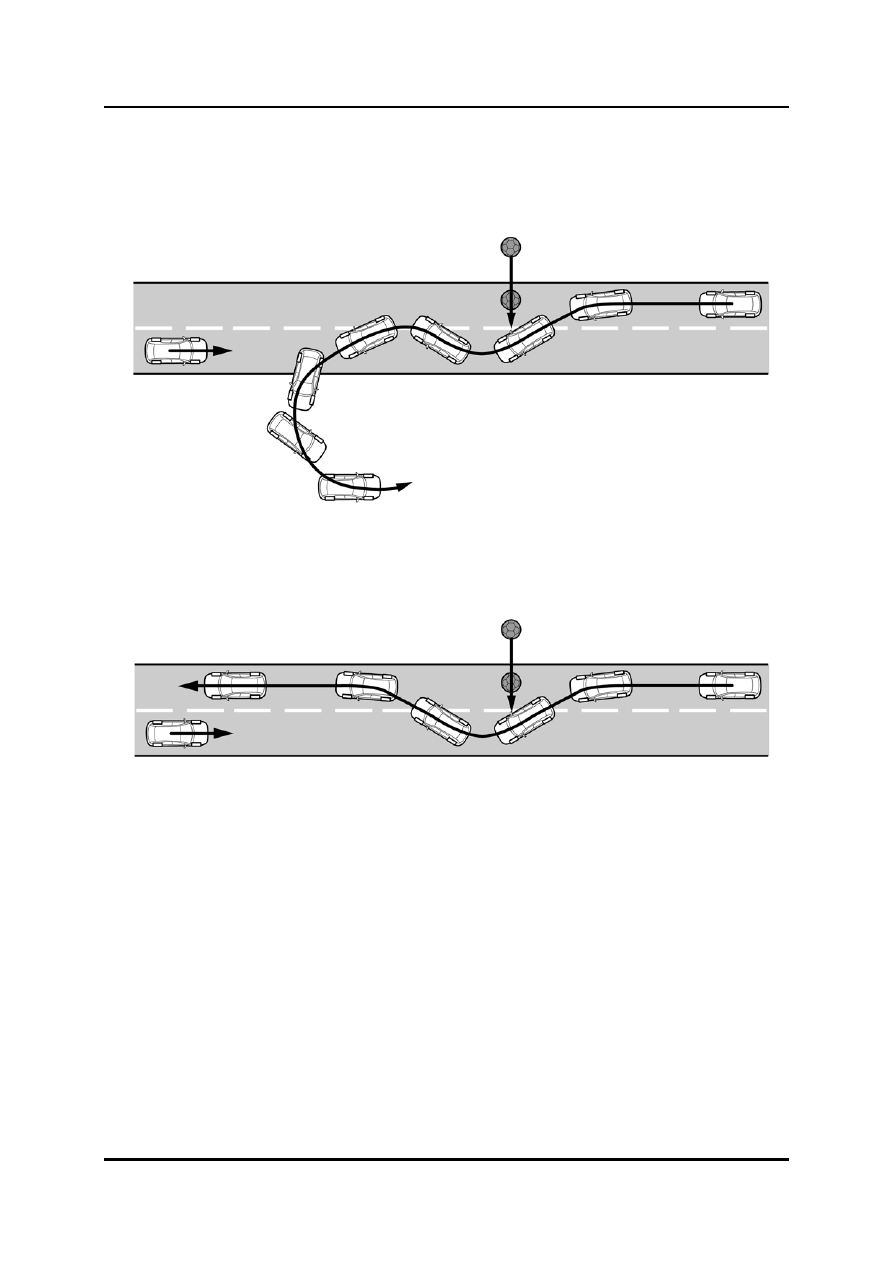
•
The illustration shows the vehicle handling with and without DSC intervention in a critical
situation.
L2003_01016
Obstacle suddenly appearing, vehicle without DSC
L2003_01013
Obstacle suddenly appearing, vehicle with DSC
01-18 Curriculum
Training
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст