Lexus LC500C (2022 year). Manual in english — page 12

201
4-5. Using the driving support systems
4
Driving
the sensor, the system should return to nor-
mal.
Also, due to the sensor being frozen at low
temperatures, a malfunction display may
appear or an obstacle may not be detected.
If the sensor thaws out, the system should
return to normal.
■
If “Parking Assist Malfunction” or
“Parking Assist Malfunction Visit Your
Dealer” is displayed on the multi-infor-
mation display
There is a malfunction and the device may
not be working properly.
Have the vehicle inspected by your Lexus
dealer.
●
The following situations may occur
during use.
• Depending on the shape of the object
and other factors, the detection distance
may shorten, or detection may be impos-
sible.
• Detection may be impossible if static
objects draw too close to the sensor.
• There will be a short delay between static
object detection and display (warning
buzzer sounds). Even at low speeds,
there is a possibility that the object will
come within 1.0 ft. (30 cm) before the
display is shown and the warning buzzer
sounds.
• It might be difficult to hear the buzzer due
to the volume of the audio system or air
flow noise of the air conditioning system.
• It may be difficult to hear the sound of this
system due to the buzzers of other sys-
tems.
■
Objects which the system may not prop-
erly detect
The shape of the object may prevent the
sensor from detecting it. Pay particular
attention to the following objects:
●
Wires, fences, ropes, etc.
●
Cotton, snow and other materials that
absorb sound waves
●
Sharply-angled objects
●
Low objects
●
Tall objects with upper sections project-
ing outwards in the direction of your vehi-
cle
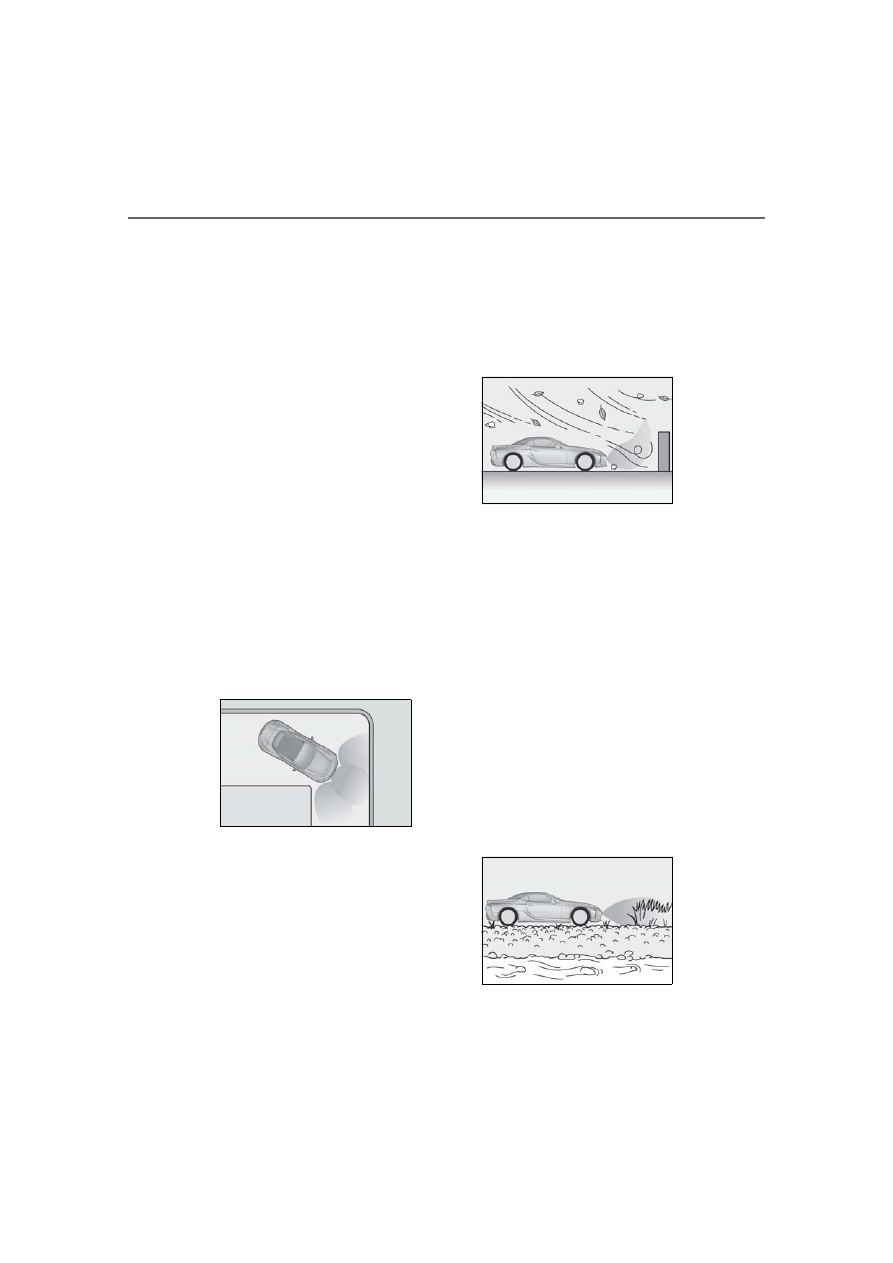
■
Situations in which the system may not
operate properly
Certain vehicle conditions and the sur-
rounding environment may affect the ability
of a sensor to correctly detect objects. Par-
ticular instances where this may occur are
listed below.
●
There is dirt, snow, water drops or ice on
a sensor. (Cleaning the sensors will
resolve this problem.)
●
A sensor is frozen. (Thawing the area will
resolve this problem.)
In especially cold weather, if a sensor is
frozen the sensor display may be dis-
played abnormally, or objects, such as a
wall, may not be detected.
●
When a sensor or the area around a sen-
sor is extremely hot or cold.
●
On an extremely bumpy road, on an
incline, on gravel, or on grass.
●
When vehicle horns, vehicle detectors,
motorcycle engines, air brakes of large
vehicles, the clearance sonar of other
vehicles or other devices which produce
ultrasonic waves are near the vehicle.
●
A sensor is coated with a sheet of spray
or heavy rain.
●
If objects draw too close to the sensor.
●
When a pedestrian is wearing clothing
that does not reflect ultrasonic waves (ex.
skirts with gathers or frills).
●
When objects that are not perpendicular
to the ground, not perpendicular to the
vehicle traveling direction, uneven, or
waving are in the detection range.
●
Strong wind is blowing.
●
When driving in inclement weather such
as fog, snow or a sandstorm.
●
When an object that cannot be detected
is between the vehicle and a detected
202
4-5. Using the driving support systems
object.
●
If an object such as a vehicle, motorcycle,
bicycle or pedestrian cuts in front of the
vehicle or runs out from the side of the
vehicle.
●
If the orientation of a sensor has been
changed due to a collision or other
impact.
●
When equipment that may obstruct a
sensor is installed, such as a towing eye-
let, bumper protector (an additional trim
strip, etc.), bicycle carrier, or snow plow.
●
If the front of the vehicle is raised or low-
ered due to the carried load.
●
If the vehicle cannot be driven in a stable
manner, such as when the vehicle has
been in an accident or is malfunctioning.
●
When tire chains, a compact spare tire or
an emergency tire puncture repair kit are
used.
■
Situations in which the system may
operate even if there is no possibility of a
collision
In some situations, such as the following, the
system may operate even though there is
no possibility of a collision.
●
When driving on a narrow road.
●
When driving toward a banner, flag, low-
hanging branch or boom barrier (such as
those used at railroad crossings, toll
gates and parking lots).
●
When there is a rut or hole in the surface
of the road.
●
When driving on a metal cover (grating),
such as those used for drainage ditches.
●
When driving up or down a steep slope.
●
If a sensor is hit by a large amount of
water, such as when driving on a flooded
road.
●
There is dirt, snow, water drops or ice on
a sensor. (Cleaning the sensors will
resolve this problem.)
●
A sensor is coated with a sheet of spray
or heavy rain.
●
When driving in inclement weather such
as fog, snow or a sandstorm.
●
When strong winds are blowing.
●
When vehicle horns, vehicle detectors,
motorcycle engines, air brakes of large
vehicles, the clearance sonar of other
vehicles or other devices which produce
ultrasonic waves are near the vehicle.
●
If the front of the vehicle is raised or low-
ered due to the carried load.
●
If the orientation of a sensor has been
changed due to a collision or other
impact.
●
The vehicle is approaching a tall or
curved curb.
●
Driving close to columns (H-shaped steel
beams, etc.) in multi-story parking
garages, construction sites, etc.
●
If the vehicle cannot be driven in a stable
manner, such as when the vehicle has
been in an accident or is malfunctioning.
●
On an extremely bumpy road, on an
incline, on gravel, or on grass.
●
When tire chains, a compact spare tire or
an emergency tire puncture repair kit are
used.

203
4-5. Using the driving support systems
4
Driving
■
Customization
Some functions can be customized.
(
■
Certification
For vehicles sold in the U.S.A.
For vehicles sold in Canada
WARNING
■
Cautions regarding the use of the
system
There is a limit to the degree of recogni-
tion accuracy and control performance
that this system can provide, do not
overly rely on this system. The driver is
always responsible for paying attention
to the vehicle’s surroundings and driving
safely.
■
To ensure the system can operate
properly
Observe the following precautions.
Failing to do so may result in the vehicle
being unable to be driven safely and pos-
sibly cause an accident.
●
Do not damage the sensors, and
always keep them clean.
●
Do not attach a sticker or install an
electronic component, such as a back-
lit license plate (especially fluorescent
type), fog lights, fender pole or wire-
less antenna near a radar sensor.
●
Do not subject the surrounding area of
the sensor to a strong impact. If sub-
jected to an impact, have the vehicle
inspected by your Lexus dealer. If the
front or rear bumper needs to be
removed/installed or replaced, con-
tact your Lexus dealer.
●
Do not modify, disassemble or paint
the sensors.
●
Do not attach a license plate cover.
●
Keep your tires properly inflated.

204
4-5. Using the driving support systems
■
Detection range of the sensors
Approximately 3.3 ft. (100 cm)
Approximately 4.9 ft. (150 cm)
Approximately 2.0 ft. (60 cm)
The diagram shows the detection range of
the sensors. Note that the sensors cannot
detect obstacles that are extremely close
to the vehicle.
The range of the sensors may change
depending on the shape of the object etc.
■
Multi-information display, head-up
display and Center Display
Sensors that detect an obstacle will illu-
minate continuously or blink.
WARNING
■
When to disable the function
In the following situations, disable the
function as it may operate even though
there is no possibility of a collision.
●
Failing to observe the warnings above.
●
A non-genuine Lexus suspension
(lowered suspension, etc.) is installed.
■
Notes when washing the vehicle
●
Do not apply intensive bursts of water
or steam to the sensor area.
Doing so may result in the sensor mal-
functioning.
●
When using a high pressure washer to
wash the vehicle, do not spray the sen-
sors directly, as doing so may cause a
sensor to malfunction.
●
When using steam to clean the vehi-
cle, do not direct steam too close to
the sensors as doing so may cause a
sensor to malfunction.
NOTICE
■
When using intuitive parking assist
In the following situations, the system
may not function correctly due to a sen-
sor malfunction etc. Have the vehicle
checked by your Lexus dealer.
●
The intuitive parking assist operation
display flashes or shows continuously,
and a beep sounds when no obstacles
are detected.
●
If the bumper or grille collides with
something.
●
If the display flashes or shows continu-
ously without beeping, except when
the mute function has been turned on.
●
If a display error occurs, first check the
sensor.
If the error occurs even when there is
no ice, snow or mud on the sensor, it is
likely that the sensor is malfunctioning.
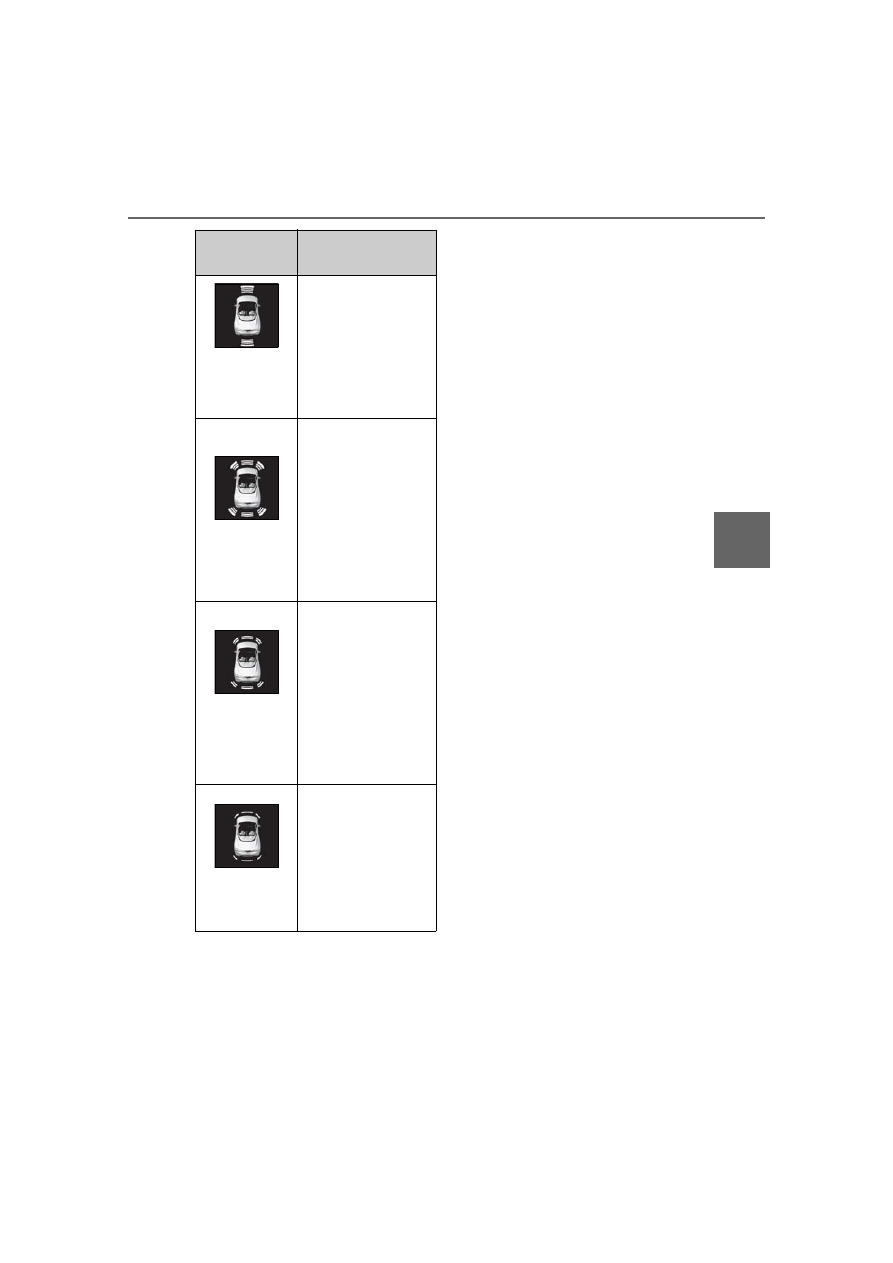
Sensor detection display, obsta-
cle distance
A
B
C
205
4-5. Using the driving support systems
4
Driving
*1
: The illustrations show the graphics on
the Multi-information display, and differ
from the graphics on the head-up dis-
play and Center Display. Depending on
the distance of the obstacle, the sensor
display on the Center Display illumi-
nates or blinks in various cycles,
although the width of it does not
change.
*2
: Multi-information display and head-up
display
*3
: Center Display
■
Buzzer operation and distance to
an obstacle
A buzzer sounds when the sensors are
operating.
The buzzer beeps faster as the vehi-
cle approaches an obstacle. When
the vehicle comes within the follow-
ing distance of the obstacle, the
buzzer sounds continuously:
• Front center sensors: Approximately 1.0
ft. (30 cm)
• Corner sensors: Approximately 1.0 ft.
(30 cm)
• Rear center sensors: Approximately 1.1
ft. (35 cm)
When 2 or more obstacles are
detected simultaneously, the buzzer
system responds to the nearest
obstacle. If one or both come within
the above distances, the beep will
repeat a long tone, followed by fast
beeps.
Display
*1
Approximate distance
to obstacle
(continuous
*2
or
blinking
slowly
*3
)
Front center sensor:
3.3 ft. (100 cm) to 1.6 ft.
(50 cm)
Rear center sensor: 4.9
ft. (150 cm) to 2.0 ft.
(60 cm)
(continuous
*2
or
blinking
*3
)
Front center sensor: 1.6
ft. (50 cm) to 1.3 ft. (40
cm)
Rear center sensor: 2.0
ft. (60 cm) to 1.5 ft. (45
cm)
Front and rear corner
sensor: 2.0 ft. (60 cm)
to 1.5 ft. (45 cm)
(continuous
*2
or
blinking rap-
idly
*3
)
Front center sensor: 1.3
ft. (40 cm) to 1.0 ft. (30
cm)
Rear center sensor: 1.5
ft. (45 cm) to 1.1 ft. (35
cm)
Front and rear corner
sensor: 1.5 ft. (45 cm) to
1.0 ft. (30 cm)
(blinking
*2
or
continuous
*3
)
Front center sensor:
Less than 1.0 ft. (30 cm)
Rear center sensor:
Less than 1.1 ft. (35 cm)
Front and rear corner
sensor: Less than 1.0 ft.
(30 cm)
206
4-5. Using the driving support systems
Multi-information display
Turning the BSM function/RCTA function
on/off.
The RCTA function is available when the
BSM function is on.
Outside rear view mirror indicators
BSM function:
When a vehicle is detected in a blind spot
of the outside rear view mirrors or
approaching rapidly from behind into a
blind spot, the outside rear view mirror
indicator on the detected side will illumi-
nate. If the turn signal lever is operated
toward the detected side, the outside rear
view mirror indicator will flash.
RCTA function:
When a vehicle approaching from the right
or left at the rear of the vehicle is detected,
both outside rear view mirror indicators
will flash.
BSM indicator/RCTA indicator
When the BSM function/RCTA function is
turned on, the indicator comes on.
Monitor screen display (RCTA
function only)
If a vehicle approaching from the right or
left at the rear of the vehicle is detected,
the RCTA icon (
P.211) for the detected
side will be displayed on the monitor
screen. This illustration shows an example
of a vehicle approaching from the left at
the rear of the vehicle.
RCTA buzzer (RCTA function
only)
If a vehicle approaching from the right or
left at the rear of the vehicle is detected, a
buzzer will sound. The buzzer also sounds
for approximately 1 second immediately
after the BSM function is operated to turn
the system on.
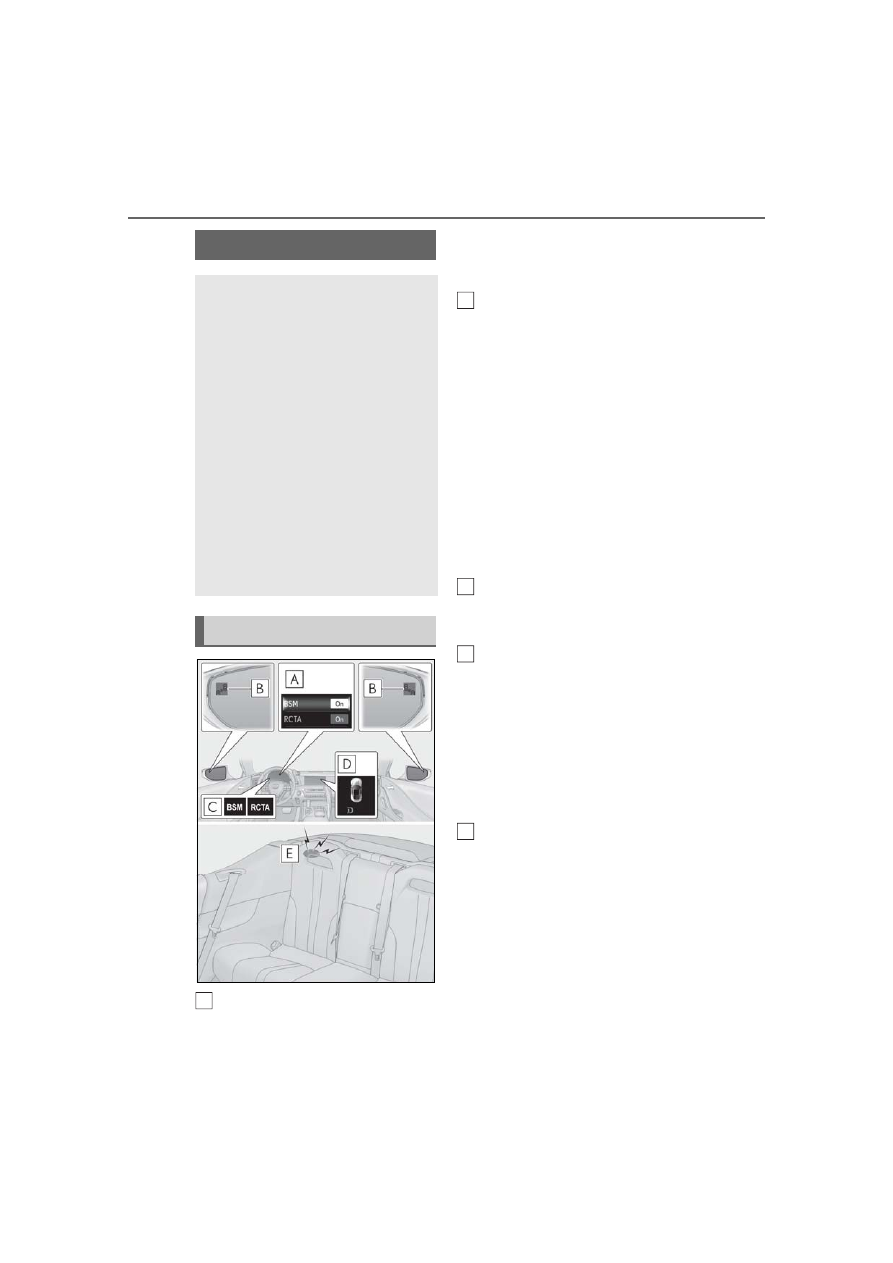
BSM (Blind Spot Monitor)
The Blind Spot Monitor uses the
sensors installed behind the rear
bumper. The system is intended to
assist the driver check areas that
are not easily visible. The system
has the following 2 functions:
The BSM (Blind Spot Monitor)
function
Assists the driver in making a deci-
sion when changing lanes
The RCTA (Rear Cross Traffic
Alert) function
Assists the driver when backing up
These functions use same sensors.
System components
A
B
C
D
E
207
4-5. Using the driving support systems
4
Driving
1
Press
or
of the meter con-
trol switches, select
.
2
Press
or
of the meter con-
trol switches, select “BSM”, and
then press “OK”.
3
Press
or
of the meter con-
trol switches, select “BSM” or
“RCTA”, and press “OK”.
■
Outside rear view mirror indicator visi-
bility
In strong sunlight, the outside rear view mir-
ror indicator may be difficult to see.
■
Hearing the RCTA buzzer
The RCTA buzzer may be difficult to hear
over loud noises, such as if the audio system
volume is high.
■
When “Blind Spot Monitor Unavailable”
is shown on the multi-information dis-
play
Water, snow, mud, etc., may be built up in
the vicinity of the sensor area of bumper.
(
P.207) Removing the water, snow, mud,
etc., from the vicinity of the sensor area
bumper should return it to normal.
Also, the sensor may not function normally
when used in extremely hot or cold
weather.
■
When “Blind Spot Monitor System Mal-
function” is shown on the multi-informa-
tion display
There may be a sensor malfunction or volt-
age abnormality. Have the vehicle
inspected at your Lexus dealer.
■
Customization
Some functions can be customized. (Cus-
tomizable features:
Turning the BSM func-
tion/RCTA function on/off
WARNING
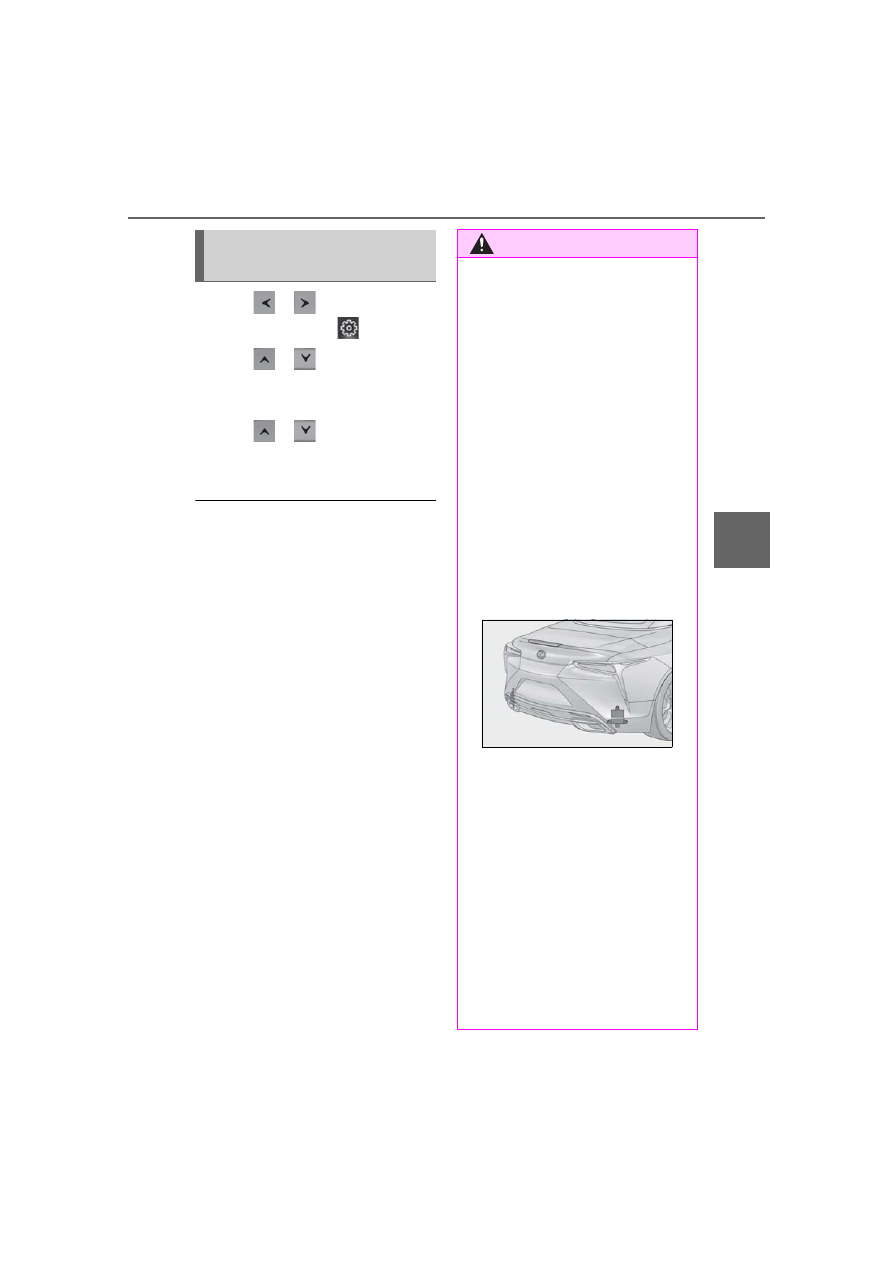
■
To ensure the system can operate
properly
Blind Spot Monitor sensors are installed
behind the left and right sides of the rear
bumper respectively. Observe the fol-
lowing to ensure the Blind Spot Monitor
can function correctly.
●
Keep the sensors and the surrounding
areas on the rear bumper clean at all
times.
If a sensor or its surrounding area on
the rear bumper is dirty or covered
with snow, the Blind Spot Monitor may
not operate and a warning message
(
P.207) will be displayed. In this sit-
uation, clear off the dirt or snow and
drive the vehicle with the operation
conditions of the BSM function
(
P.209) satisfied for approximately
10 minutes. If the warning message
does not disappear, have the vehicle
inspected by your Lexus dealer.
●
Do not subject a sensor or its sur-
rounding area on the rear bumper to a
strong impact.
If a sensor is moved even slightly off
position, the system may malfunction
and vehicles may not be detected cor-
rectly.
In the following situations, have your
vehicle inspected by your Lexus
dealer.
• A sensor or its surrounding area is
subject to a strong impact.
• If the surrounding area of a sensor is
scratched or dented, or part of them
has become disconnected.
●
Do not disassemble the sensor.
208
4-5. Using the driving support systems
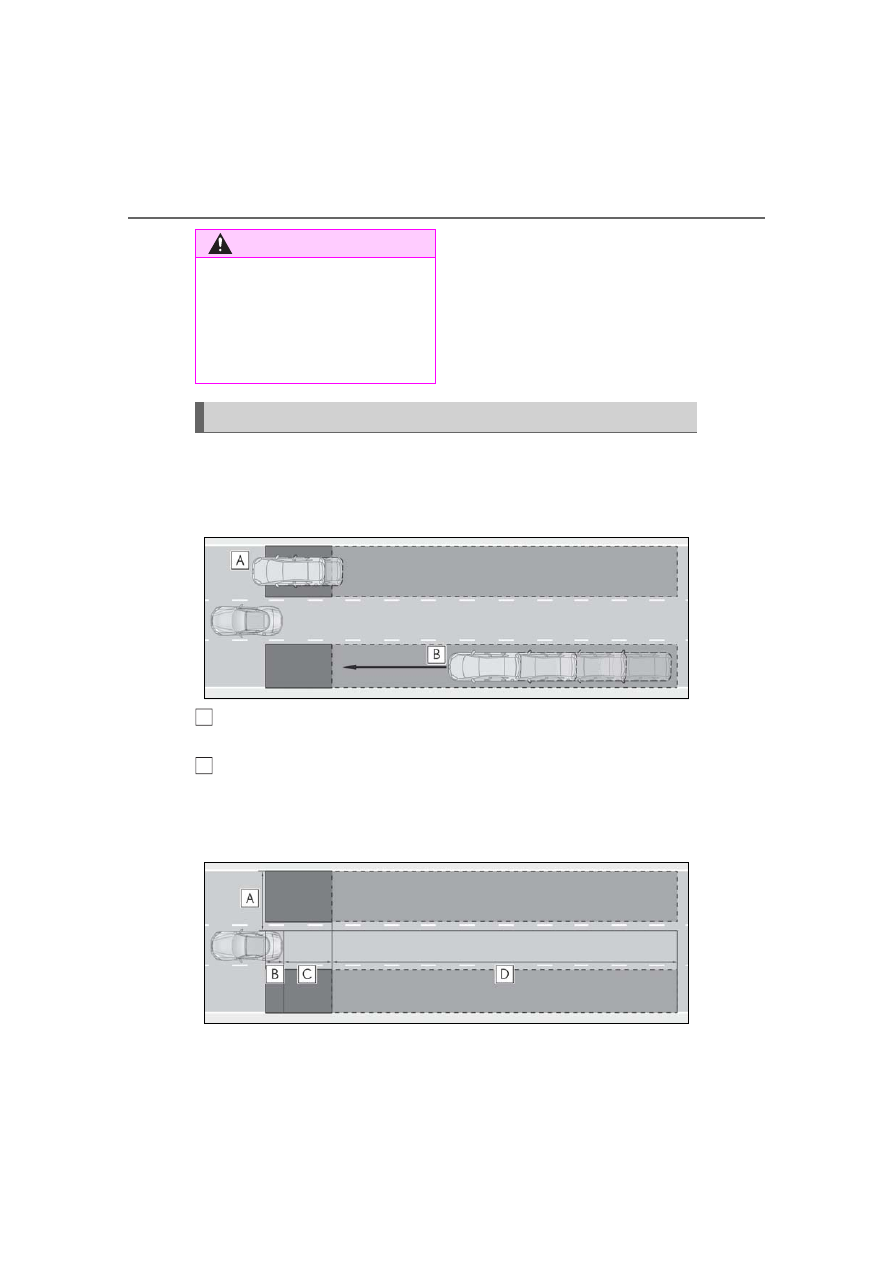
■
Operation of the BSM function
The BSM function uses radar sensors to detect the following vehicles traveling in
adjacent lanes and advises the driver of the presence of such vehicles via the indi-
cators on the outside rear view mirrors.
Vehicles that are traveling in areas that are not visible using the outside rear
view mirrors (the blind spots)
Vehicles that are approaching rapidly from behind in areas that are not visible
using the outside rear view mirrors (the blind spots)
■
BSM function detection areas
The areas that vehicles can be detected in are outlined below.
WARNING
●
Do not attach stickers to the sensor or
surrounding area on the rear bumper.
●
Do not modify the sensor or surround-
ing area on the rear bumper.
●
Do not paint the rear bumper any
color other than an official Lexus color.
BSM function
A
B
209
4-5. Using the driving support systems
4
Driving
The range of each detection area is:
Approximately 1.6 ft. (0.5 m) to 11.5 ft. (3.5 m) from either side of the vehicle
*1
Approximately 3.3 ft. (1 m) forward of the rear bumper
Approximately 9.8 ft. (3 m) from the rear bumper
Approximately 9.8 ft. (3 m) to 197 ft. (60 m) from the rear bumper
*2
*1
: The area between the side of the vehicle and 1.6 ft. (0.5 m) from the side of the vehicle
cannot be detected.
*2
: The greater the difference in speed between your vehicle and the detected vehicle is,
the farther away the vehicle will be detected, causing the outside rear view mirror indi-
cator to illuminate or flash.
■
The BSM function is operational when
The BSM function is operational when all of
the following conditions are met:
●
The BSM function is on.
●
The shift position is in a position other
than R.
●
The vehicle speed is greater than
approximately 10 mph (16 km/h).
■
The BSM function will detect a vehicle
when
The BSM function will detect a vehicle pres-
ent in the detection area in the following sit-
uations:
●
A vehicle in an adjacent lane overtakes
your vehicle.
●
You overtake a vehicle in adjacent lane
slowly.
●
Another vehicle enters the detection
area when it changes lanes.
■
Conditions under which the system will
not detect a vehicle
The BSM function is not designed to detect
the following types of vehicles and/or
objects:
●
Small motorcycles, bicycles, pedestrians,
etc.
*
●
Vehicles traveling in the opposite direc-
tion
●
Guardrails, walls, signs, parked vehicles
and similar stationary objects
*
●
Following vehicles that are in the same
lane
*
●
Vehicles traveling 2 lanes away from
your vehicle
*
●
Vehicles which are being overtaken rap-
idly by your vehicle.
*
*
: Depending on the conditions, detection
of a vehicle and/or object may occur.
■
Conditions under which the system may
not function correctly
●
The BSM function may not detect vehi-
cles correctly in the following situations:
• When the sensor is misaligned due to a
strong impact to the sensor or its sur-
rounding area
• When mud, snow, ice, a sticker, etc. is
covering the sensor or surrounding area
on the rear bumper
• When driving on a road surface that is
wet with standing water during bad
weather, such as heavy rain, snow, or fog
• When multiple vehicles are approaching
with only a small gap between each vehi-
cle
• When the distance between your vehicle
and a following vehicle is short
• When there is a significant difference in
speed between your vehicle and the
vehicle that enters the detection area
• When the difference in speed between
your vehicle and another vehicle is
changing
• When a vehicle enters a detection area
traveling at about the same speed as your
vehicle
A
B
C
D
210
4-5. Using the driving support systems
• As your vehicle starts from a stop, a vehi-
cle remains in the detection area
• When driving up and down consecutive
steep inclines, such as hills, dips in the
road, etc.
• When driving on roads with sharp bends,
consecutive curves, or uneven surfaces
• When vehicle lanes are wide, or when
driving on the edge of a lane, and the
vehicle in an adjacent lane is far away
from your vehicle
• When an accessory (such as a bicycle
carrier) or towing eyelet is installed to the
rear of the vehicle
• When there is a significant difference in
height between your vehicle and the
vehicle that enters the detection area
• Immediately after the BSM function is
turned on
●
Instances of the BSM function unneces-
sarily detecting a vehicle and/or object
may increase in the following situations:
• When the sensor is misaligned due to a
strong impact to the sensor or its sur-
rounding area
• When the distance between your vehicle
and a guardrail, wall, etc. that enters the
detection area is short
• When driving up and down consecutive
steep inclines, such as hills, dips in the
road, etc.
• When vehicle lanes are narrow, or when
driving on the edge of a lane, and a vehi-
cle traveling in a lane other than the adja-
cent lanes enters the detection area
• When driving on roads with sharp bends,
consecutive curves, or uneven surfaces
• When the tires are slipping or spinning
• When the distance between your vehicle
and a following vehicle is short
• When an accessory (such as a bicycle
carrier) or towing eyelet is installed to the
rear of the vehicle
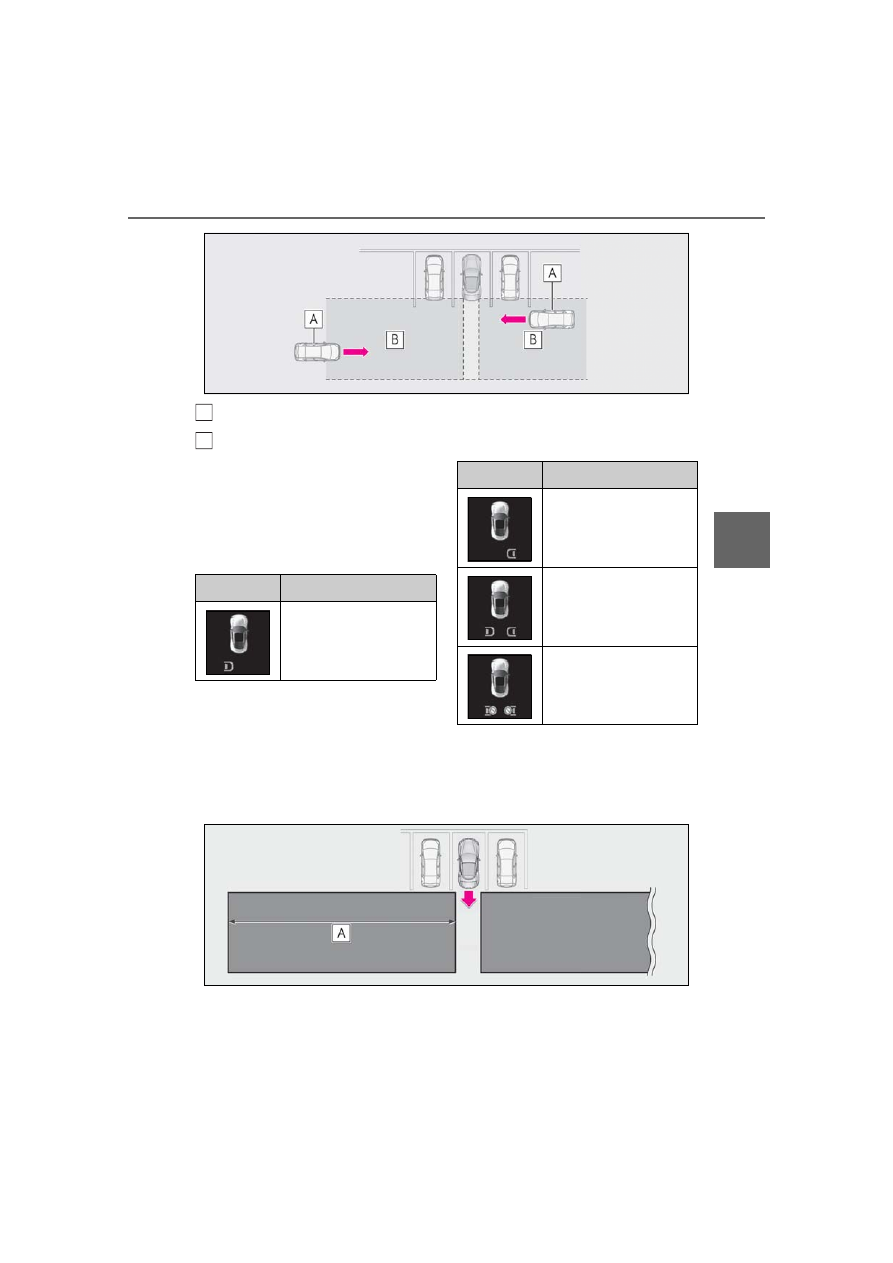
■
Operation of the RCTA function
The RCTA function uses radar sensors to detect vehicles approaching from the
right or left at the rear of the vehicle and alerts the driver of the presence of such
vehicles by flashing the outside rear view mirror indicators and sounding a buzzer.
WARNING
■
Cautions regarding the use of the
function
The driver is solely responsible for safe
driving. Always drive safely, taking care
to observe your surroundings.
The BSM function is a supplementary
function which alerts the driver that a
vehicle is in a blind spot of the outside
rear view mirrors or is approaching rap-
idly from behind into a blind spot. Do not
overly rely on the BSM function. As the
function cannot judge if it is safe to
change lanes, over reliance could lead to
an accident resulting in death or serious
injury.
As the system may not function correctly
under certain conditions, the driver’s
own visual confirmation of safety is nec-
essary.
RCTA function
211
4-5. Using the driving support systems
4
Driving
Approaching vehicles
Detection areas of approaching vehicles
■
RCTA icon display
When a vehicle approaching from the
right or left at the rear of the vehicle is
detected, the following will be dis-
played on the monitor screen.
■
RCTA function detection areas
The areas that vehicles can be detected in are outlined below.
The buzzer can alert the driver of
faster vehicles approaching from far-
ther away.
A
B
Display
Content
A vehicle is approaching
from the left at the rear of
the vehicle
A vehicle is approaching
from the right at the rear of
the vehicle
Vehicles are approaching
from both sides of the vehi-
cle
The RCTA function is mal-
functioning
(
Display
Content
212
4-5. Using the driving support systems
Example:
■
The RCTA function is operational when
The RCTA function operates when all of the
following conditions are met:
●
The RCTA function is on.
●
The shift position is in R.
●
The vehicle speed is less than approxi-
mately 5 mph (8 km/h).
●
The approaching vehicle speed is
between approximately 5 mph (8 km/h)
and 18 mph (28 km/h).
■
Conditions under which the system will
not detect a vehicle
The RCTA function is not designed to
detect the following types of vehicles
and/or objects:
●
Vehicles approaching from directly
behind
●
Vehicles backing up in a parking space
next to your vehicle
●
Vehicles that the sensors cannot detect
due to obstructions
●
Guardrails, walls, signs, parked vehicles
and similar stationary objects
*
●
Small motorcycles, bicycles, pedestrians,
etc.
*
●
Vehicles moving away from your vehicle
●
Vehicles approaching from the parking
spaces next to your vehicle
*
●
The distance between the sensor and
approaching vehicle gets too close
*
: Depending on the conditions, detection
of a vehicle and/or object may occur.
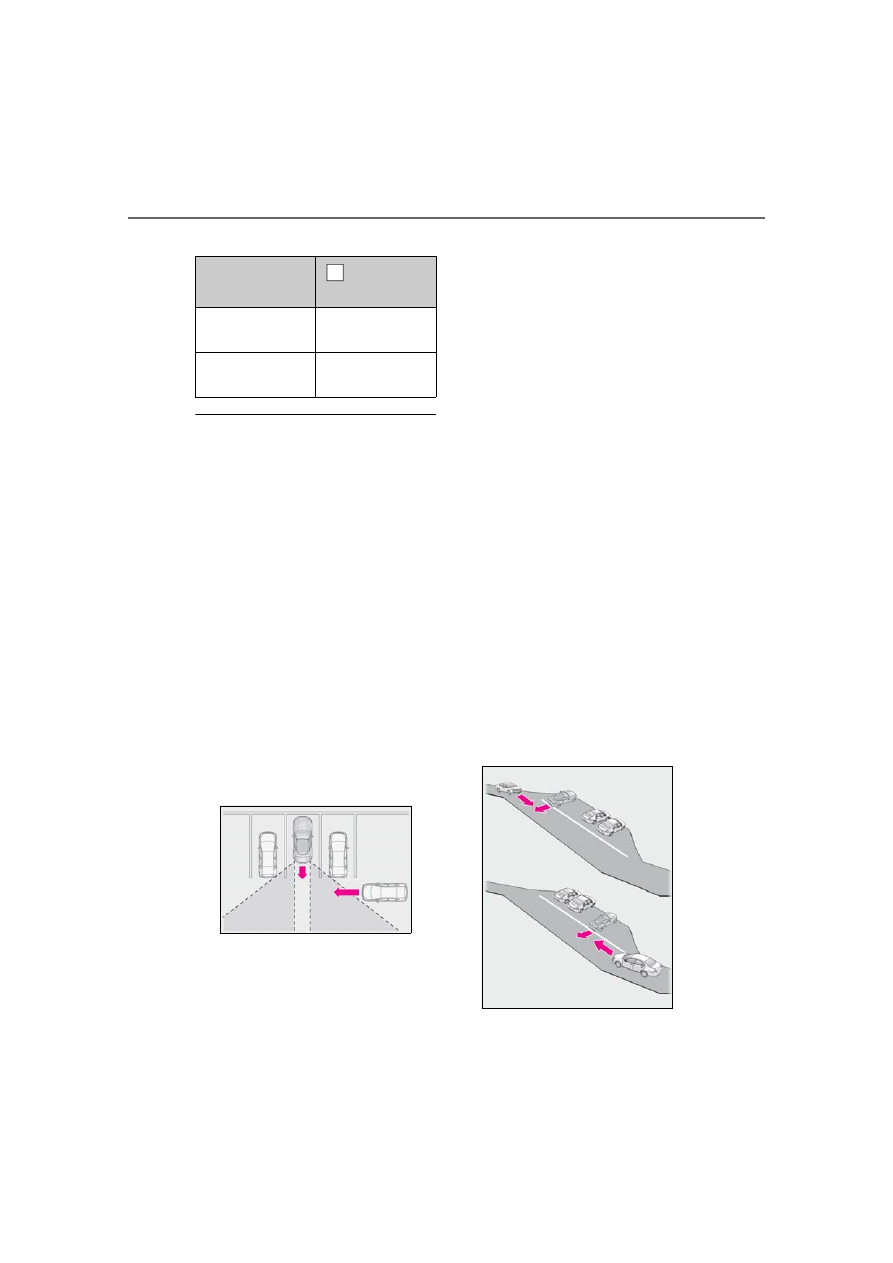
■
Situations in which the system may not
operate properly
The RCTA function may not detect vehicles
correctly in the following situations:
●
When the sensor is misaligned due to a
strong impact to the sensor or its sur-
rounding area.
●
When mud, snow, ice, a sticker, etc.,is
covering the sensor or surrounding area
on the rear bumper.
●
When driving on a road surface that is
wet with standing water during bad
weather, such as heavy rain, snow, or fog.
●
When multiple vehicles are approaching
with only a small gap between each vehi-
cle.
●
When a vehicle is approaching at high
speed.
●
When equipment that may obstruct a
sensor is installed, such as a towing eye-
let, bumper protector (an additional trim
strip, etc.), bicycle carrier, or snow plow.
●
When backing up on a slope with a sharp
change in grade.
●
When backing out of a sharp angle park-
ing spot.
Approaching vehi-
cle speed
Approximate
alert distance
18 mph (28 km/h)
(fast)
65 ft. (20 m)
5 mph (8 km/h)
(slow)
18 ft. (5.5 m)
A
213
4-5. Using the driving support systems
4
Driving
●
When towing a trailer.
●
When there is a significant difference in
height between your vehicle and the
vehicle that enters the detection area.
●
When a sensor or the area around a sen-
sor is extremely hot or cold.
●
If the suspension has been modified or
tires of a size other than specified are
installed.
●
If the front of the vehicle is raised or low-
ered due to the carried load.
●
When turning while backing up.
●
When a vehicle turns into the detection
area.
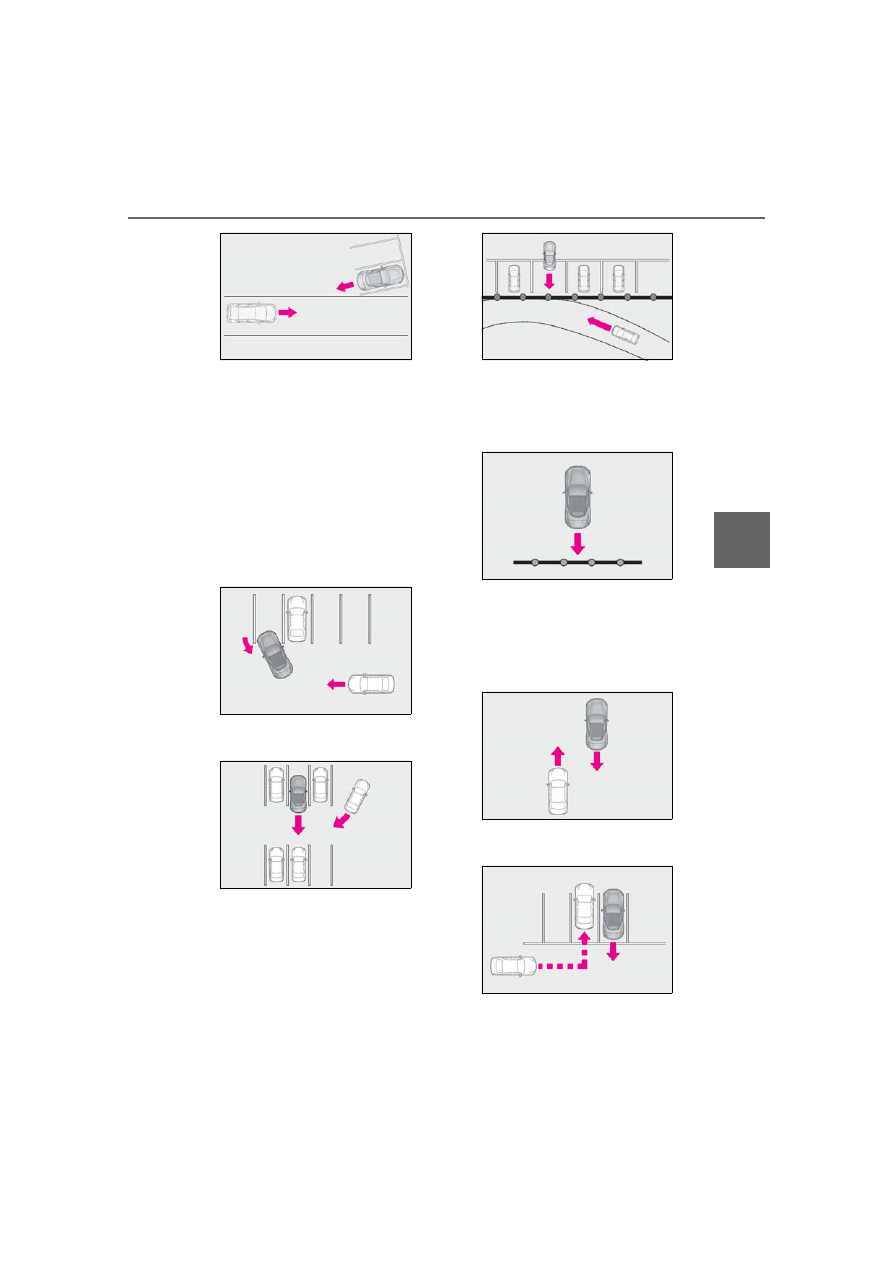
■
Situations in which the system may
operate even if there is no possibility of a
collision
Instances of the RCTA function unneces-
sarily detecting a vehicle and/or object may
increase in the following situations:
●
When the parking space faces a street
and vehicles are being driven on the
street.
●
When the distance between your vehicle
and metal objects, such as a guardrail,
wall, sign, or parked vehicle, which may
reflect electrical waves toward the rear of
the vehicle, is short.
●
When equipment that may obstruct a
sensor is installed, such as a towing eye-
let, bumper protector (an additional trim
strip, etc.), bicycle carrier, or snow plow.
●
When a vehicle passes by the side of your
vehicle.
●
When a detected vehicle turns while
approaching the vehicle.
●
When there are spinning objects near
your vehicle such as the fan of an air con-
ditioning unit.
214
4-5. Using the driving support systems
●
When water is splashed or sprayed
toward the rear bumper, such as from a
sprinkler.
●
Moving objects (flags, exhaust fumes,
large rain droplets or snowflakes, rain
water on the road surface, etc.).
●
When the distance between your vehicle
and a guardrail, wall, etc., that enters the
detection area is short.
●
Gratings and gutters.
●
When a sensor or the area around a sen-
sor is extremely hot or cold.
●
If the suspension has been modified or
tires of a size other than specified are
installed.
●
If the front of the vehicle is raised or low-
ered due to the carried load.
■
ECB (Electronically Controlled
Brake System)
The electronically controlled system
generates braking force correspond-
ing to the brake operation
■
ABS (Anti-lock Brake System)
Helps to prevent wheel lock when the
brakes are applied suddenly, or if the
brakes are applied while driving on a
slippery road surface
■
Brake assist
Generates an increased level of brak-
ing force after the brake pedal is
depressed when the system detects a
panic stop situation
■
VSC (Vehicle Stability Control)
Helps the driver to control skidding
when swerving suddenly or turning on
slippery road surfaces
■
TRAC (Traction Control)
Helps to maintain drive power and
prevent the drive wheels from spinning
when starting the vehicle or accelerat-
WARNING
■
Cautions regarding the use of the
function
There is a limit to the degree of recogni-
tion accuracy and control performance
that this system can provide, do not
overly rely on this system. The driver is
always responsible for paying attention
to the vehicle’s surroundings and driving
safely. (
■
To ensure the system can operate
properly
Driving assist systems
To keep driving safety and perfor-
mance, the following systems oper-
ate automatically in response to
various driving situations. Be
aware, however, that these systems
are supplementary and should not
be relied upon too heavily when
operating the vehicle.
Summary of the driving assist
systems
215
4-5. Using the driving support systems
4
Driving
ing on slippery roads
■
Active Cornering Assist (ACA) (if
equipped)
Helps to prevent the vehicle from drift-
ing to the outer side by performing
inner wheel brake control when
attempting to accelerate while turning
■
Hill-start assist control
Helps to reduce the backward move-
ment of the vehicle when starting on an
uphill
■
EPS (Electric Power Steering)
Employs an electric motor to reduce
the amount of effort needed to turn the
steering wheel
■
AVS (Adaptive Variable Suspen-
sion System)
By independently controlling the
damping force of the shock absorbers
for each of the 4 wheels according to
the road and driving conditions, this
system helps riding comfort with supe-
rior vehicle stability, and helps good
vehicle posture.
Also, the damping force changes
depending on the selected driving
mode. (
■
VDIM (Vehicle Dynamics Inte-
grated Management)
Provides integrated control of the
ABS, brake assist, TRAC, VSC, hill-
start assist control and EPS systems
Helps to maintain vehicle stability
when swerving on slippery road sur-
faces by controlling the brakes, engine
output, steering assist (if equipped),
and steering ratio (if equipped)
■
Secondary Collision Brake
When the SRS airbag sensor detects a
collision and the system operates, the
brakes and brake lights are automati-
cally controlled to reduce the vehicle
speed and help reduce the possibility
of further damage due to a secondary
collision
■
When the TRAC/VSC/ABS systems
are operating
The slip indicator light will flash while the
TRAC/VSC/ABS systems are operating.
■
Disabling the TRAC system
If the vehicle gets stuck in mud, dirt or snow,
the TRAC system may reduce power from
the engine to the wheels. Pressing the
switch to turn the system off may
make it easier for you to rock the vehicle in
order to free it.
To turn the TRAC system off, quickly press
and release the
switch.
“Traction Control Turned Off” will be
shown on the multi-information display.
Press the
switch again to turn the
system back on.
216
4-5. Using the driving support systems
■
Turning off both TRAC and VSC sys-
tems
To turn the TRAC and VSC systems off,
press and hold the
switch for more
than 3 seconds while the vehicle is stopped.
The VSC OFF indicator light will come on
and the “Traction Control Turned Off” will
be shown on the multi-information display.
*
Press the
switch again to turn the
system back on.
*
: PCS (Pre-Collision System) will also be
disabled (only Pre-Collision warning is
available). The PCS warning light will
come on and a message will be displayed
on the multi-information display.
(
■
When the message is displayed on the
multi-information display showing that
TRAC has been disabled even if the
switch has not been pressed
TRAC is temporary deactivated. If the
information continues to show, contact your
Lexus dealer.
■
Operating conditions of hill-start assist
control
When the following four conditions are met,
the hill-start assist control will operate:
●
The shift position is in a position other
than P or N (when starting off for-
ward/backward on an upward incline).
●
The vehicle is stopped.
●
The accelerator pedal is not depressed.
●
The parking brake is not engaged.
■
Automatic system cancelation of hill-
start assist control
The hill-start assist control will turn off in any
of the following situations:
●
The shift position is shifted to P or N.
●
The accelerator pedal is depressed.
●
The parking brake is engaged.
●
2 seconds at maximum elapsed after the
brake pedal is released.
■
Sounds and vibrations caused by the
ABS, brake assist, VSC, TRAC and hill-
start assist control systems
●
A sound may be heard from the engine
compartment when the brake pedal is
depressed repeatedly, when the engine is
started or just after the vehicle begins to
move. This sound does not indicate that a
malfunction has occurred in any of these
systems.
●
Any of the following conditions may
occur when the above systems are oper-
ating. None of these indicates that a mal-
function has occurred.
• Vibrations may be felt through the vehi-
cle body and steering.
• A motor sound may be heard also after
the vehicle comes to a stop.
■
ECB operating sound
ECB operating sound may be heard in the
following cases, but it does not indicate that
a malfunction has occurred.
●
Operating sound heard from the engine
compartment when the brake pedal is
operated.
●
Motor sound of the brake system heard
from the front part of the vehicle when
the driver’s door is opened.
●
Operating sound heard from the engine
compartment when one or two minutes
passed after the stop of the engine.
■
Active Cornering Assist operation
sounds and vibrations
When the Active Cornering Assist is oper-
ated, operation sounds and vibrations may
be generated from the brake system, but
this is not a malfunction.
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст