Toyota Camry (2018 year). Manual — part 59

246
4-5. Using the driving support systems
Operational conditions
The pre-collision system is enabled and the system determines that the pos-
sibility of a frontal collision with a vehicle or pedestrian is high.
Each function is operational at the following speeds:
●
Pre-collision warning:
• Vehicle speed is between approximately 7 and 110 mph (10 and 180
km/h). (For detecting a pedestrian, vehicle speed is between approxi-
mately 7 and 50 mph [10 and 80 km/h].)
• The relative speed between your vehicle and the vehicle or pedestrian
ahead is approximately 7 mph (10 km/h) or more.
●
Pre-collision brake assist:
• Vehicle speed is between approximately 20 and 110 mph (30 and 180
km/h). (For detecting a pedestrian, vehicle speed is between approxi-
mately 20 and 50 mph [30 and 80 km/h].)
• The relative speed between your vehicle and the vehicle or pedestrian
ahead is approximately 20 mph (30 km/h) or more.
●
Pre-collision braking:
• Vehicle speed is between approximately 7 and 110 mph (10 and 180
km/h). (For detecting a pedestrian, vehicle speed is between approxi-
mately 7 and 50 mph [10 and 80 km/h].)
• The relative speed between your vehicle and the vehicle or pedestrian
ahead is approximately 7 mph (10 km/h) or more.
The system may not operate in the following situations:
●
If a battery terminal has been disconnected and reconnected and then the
vehicle has not been driven for a certain amount of time
●
If the shift lever is in R
●
If VSC is disabled (only the pre-collision warning function will be opera-
tional)
■
Pedestrian detection function
■
Cancelation of the pre-collision braking
If either of the following occur while the pre-collision braking function is oper-
ating, it will be canceled:
●
The accelerator pedal is depressed strongly.
●
The steering wheel is turned sharply or abruptly.
The pre-collision system detects pedestri-
ans based on the size, profile, and motion
of a detected object. However, a pedes-
trian may not be detected depending on
the surrounding brightness and the
motion, posture, and angle of the
detected object, preventing the system
from operating properly. (
247
4-5. Using the driving support systems
4
Drivin
g
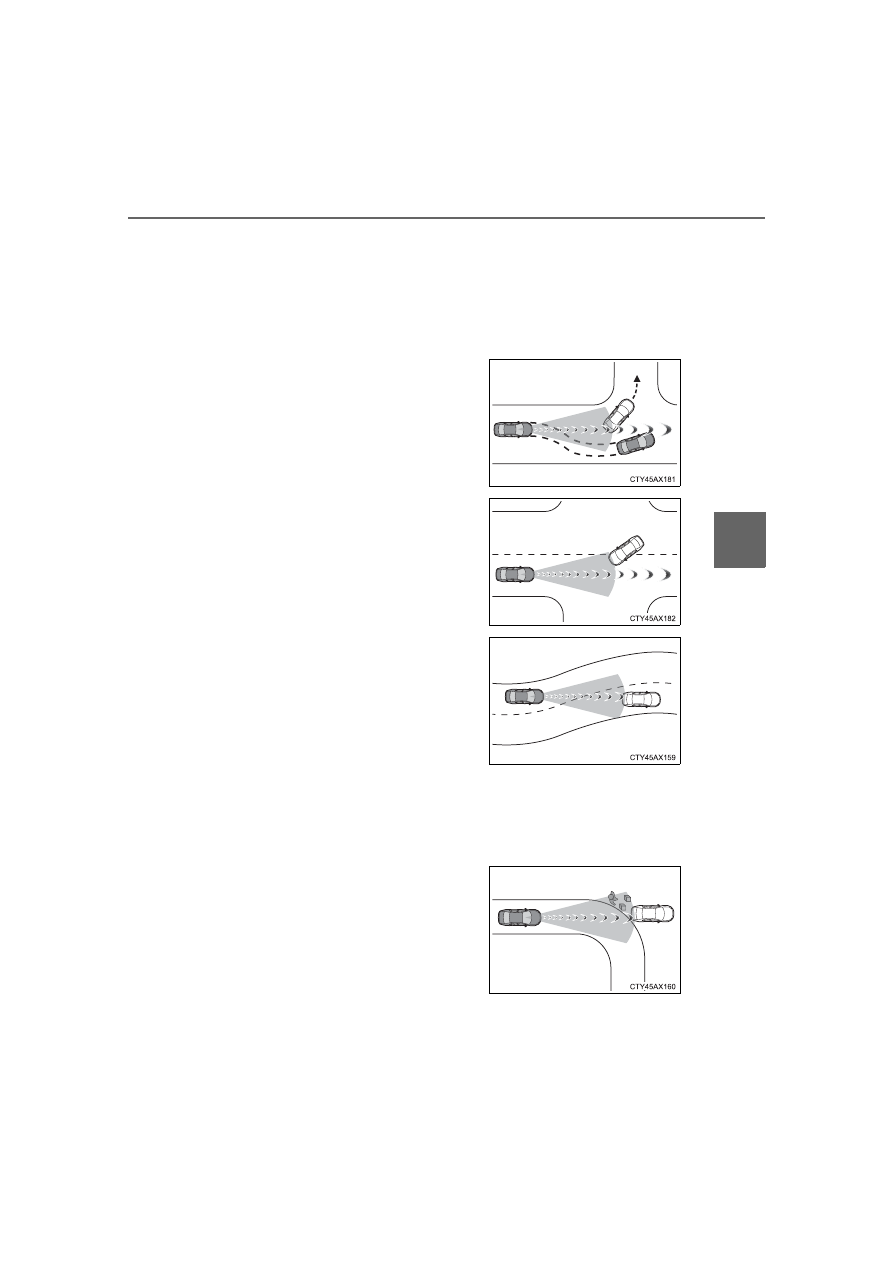
Conditions under which the system may operate even if there is no pos-
sibility of a collision
●
In some situations such as the following, the system may determine that
there is a possibility of a frontal collision and operate.
• When passing a vehicle or pedestrian
• When changing lanes while overtaking a preceding vehicle
• When overtaking a preceding vehicle that is changing lanes
• When rapidly closing on a vehicle ahead
• If the front of the vehicle is raised or lowered, such as when the road sur-
face is uneven or undulating
• When approaching objects on the roadside, such as guardrails, utility
poles, trees, or walls
• When driving on a narrow path surrounded by a structure, such as in a
tunnel or on an iron bridge
• When overtaking a preceding vehicle
that is making a left/right turn
• When passing a vehicle in an oncom-
ing lane that is stopped to make a
right/left turn
• When driving on a road where relative
location to vehicle ahead in an adja-
cent lane may change, such as on a
winding road
• When there is a vehicle, pedestrian,
or object by the roadside at the
entrance of a curve

248
4-5. Using the driving support systems
protrusion on the road surface or roadside
• When rapidly closing on an electric toll gate barrier, parking area barrier,
or other barrier that opens and closes
• When using an automatic car wash
• When the vehicle is hit by water, snow, dust, etc. from a vehicle ahead
• When driving through steam or smoke
• When there are patterns or paint on the road or a wall that may be mis-
taken for a vehicle or pedestrian
• When driving near an object that reflects radio waves, such as a large
truck or guardrail
• When driving near a TV tower, broadcasting station, electric power plant,
or other location where strong radio waves or electrical noise may be
present
• When a crossing pedestrian
approaches very close to the vehicle
• When passing through a place with a
low structure above the road (low ceil-
ing, traffic sign, etc.)
• When passing under an object (bill-
board, etc.) at the top of an uphill road
• When driving through or under
objects that may contact the vehicle,
such as thick grass, tree branches, or
a banner

249
4-5. Using the driving support systems
4
Drivin
g
Situations in which the system may not operate properly
●
In some situations such as the following, a vehicle may not be detected by
the radar sensor and camera sensor, preventing the system from operating
properly:
• If an oncoming vehicle is approaching your vehicle
• If a vehicle ahead is a motorcycle or bicycle
• When approaching the side or front of a vehicle
• If a preceding vehicle has a small rear end, such as an unloaded truck
• If a vehicle ahead is carrying a load which protrudes past its rear bumper
• If a vehicle ahead is irregularly shaped, such as a tractor or side car
• If the sun or other light is shining directly on a vehicle ahead
• If a vehicle cuts in front of your vehicle or emerges from beside a vehicle
• If a vehicle ahead makes an abrupt maneuver (such as sudden swerving,
acceleration or deceleration)
• When suddenly cutting behind a preceding vehicle
• When driving in inclement weather such as heavy rain, fog, snow or a
sandstorm
• When the vehicle is hit by water, snow, dust, etc. from a vehicle ahead
• When driving through steam or smoke
• When driving in a place where the surrounding brightness changes sud-
denly, such as at the entrance or exit of a tunnel
• If a preceding vehicle has a low rear
end, such as a low bed trailer
• If a vehicle ahead has extremely high
ground clearance
• When a vehicle ahead is not directly
in front of your vehicle
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст