Toyota Sequoia (2005). Manual — part 965
SEQUOIA (EM00Z0U)
356
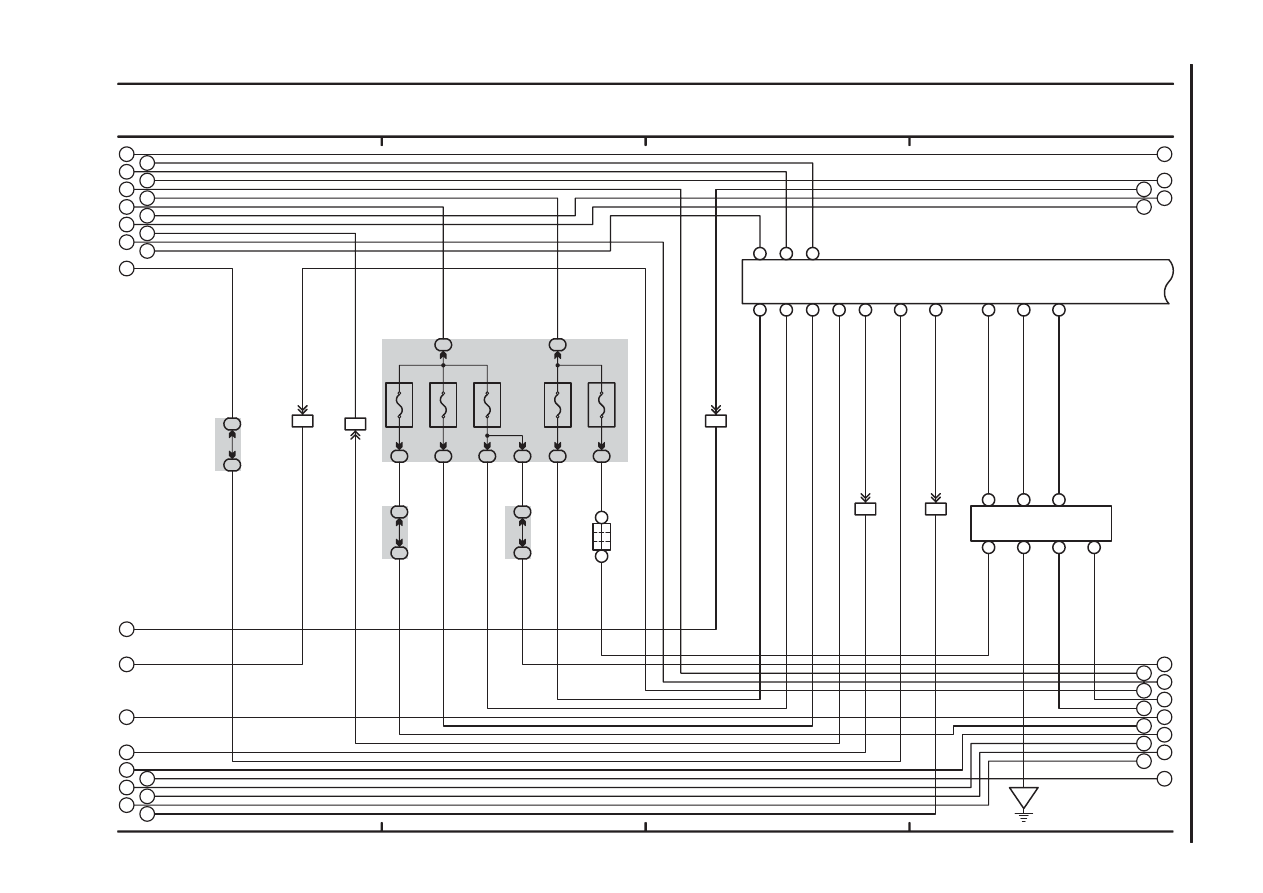
M OVERALL ELECTRICAL WIRING DIAGRAM
9
10
11
12
(Cont. next page)
(
∗
4
)
R–G
(
∗
2)
(
∗
2)
R–G
(
∗
4
)
(
∗
4
)
J14
(A
), J
1
5
(B
)
∗
3 : w/ Front Fog Light
(
∗
4
)
P
W–B
W–B
R–W(
∗
3)
B–R
R
R–G(
∗
2)
LG(
∗
4)
Y(
∗
4)
W–B(
∗
1)
R–Y(
∗
5)
Y–R(
∗
2)
W–B
W–B
BR
E
(
∗
4
)
(
∗
4
)
MSW
(
∗
4
)
(
∗
4
)
M+
LG
Y
W–B
P
LG–
B
P–
L
G–
B
R 5
(A
)
MF
MR
E2
B
MIRE
MIRS
MIRB
B 5(A), B 6(B), B 7(C)
A
F
B
D
TRLY
C
11
LG
R
(
∗
1
)
R–
W
(
∗
1
)
R
(
∗
1
)
R–
W
(
∗
1
)
LG–
R
DIM
H–ON
HRLY
C
8
C
17
C
16
IA1
18
IA1
17
L–
W
B–
R
L–
Y
GR
IG
C
6
BDR
WIG
ACC
B
2
5 C
10 C
1
W–L
W–R
18
S+B
C
HR
IM
Rear Console
30
4D
3
4C
3
R–
Y
10A HT
R
4 1E
R–
Y
A
W–L
R–L
P
B–R
L–W
W–R
Y–R(
∗
2)
W–B
7 IA5
25A W
S
H
10A ECU–
IG
3 1G
10
7.
5A RAD NO
. 2
1G
1G
11
W–B
A
29
R–G(
∗
2)
28 A
B
L–
Y
B–
R
GR
P
B–
Y
L–
W
L–
W
(
∗
1)
LG
R–W(
∗
3)
B–Y
W–R
R
M u ltip le x C o m m u n ic a tio n S y s te m (B E A N )
∗
1 : w/ Daytime Running Light
∗
2 : w/o Daytime Running Light
1F
4
1C
4
1C
1
B–
R
4 SEQUOIA (Cont' d)
R–W(
∗
1)
BR
8 3A
B–
R
3C
(
∗
4
)
15A CI
G
1E
8
20
P
R(
∗
1)
W–B
W–R
B–R
R–L
LG–R
2 IA5
1J
6
1G
9
11 IA1
R–
G
(
∗
2
)
R–
G
(
∗
2
)
LG–
R
LG–
R
(
∗
2
)
R–
G
Body ECU
Juncti
on C
onnector
R
e
m
o
te C
ontr
o
l M
irr
or
S
W
(
∗
5
)(
∗
5
)
∗
5 : w/ Glass Breakage Sensor
∗
4 : w/ Driving Position Memory
A
2
A
1
A
3
A
8
A
7
A
4
A
6
W–R
W–R
R–
G
(
∗
2
)
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
V
W
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
SEQUOIA (EM00Z0U)
357
M
13
16
15
14
(Cont. next page)
W–B
4
R
B–R
M2
7
M1
24
4 SEQUOIA (Cont' d)
∗
2 : w/o Daytime Running Light
∗
1 : w/ Daytime Running Light
M u ltip le x C o m m u n ic a tio n S y s te m (B E A N )
R–G(
∗
2)
14
13
(
∗
2
)
10
B 5(A), B 6(B), B 7(C)
A
16
HU
D
imme
r S
W
L
ight C
ontr
o
l
SW
ON
Head
AUTO
Low
OFF
Tail
High
Flash
OFF
Fog
L
ight
SW
12
8
1B
2
1K
2
1B
1
13 B
B
9
7 B
10 B
8 B
11 B
14 B
15 B
W–R
6
5
W
P–
L
FFOG
Y–
R
HEAD
TAIL
Y–
R
A
HF
HU
G–
B
23
G–
Y
G
L–
R
R–
L
R–L
Y–
R
BDN
BUP
(
∗
6
)
W–B
B
Do
wn
Up
EL
HF
∗
6 : w/ Automatic Light Control
T
H
HL
LFG
BFG
17
Y(
∗
4)
7
W–B
IA1
15 C
LG
1
2
W–B
LG
BZR
B
u
zzer
W 1
W–B
P 8
P 9
P 3
P 4
J29
(A
), J
3
0
(B
)
J46
(A
), J
4
7
(B
)
J44
(A
), J
4
5
(B
)
L A
E B
B
D
A
K
B
A
A
E
B
G
A
N
B
C
A
J
B
B
A
I
W–B
W–B
Center Pillar LH
BH
W–B
W–B
Center Pillar RH
BK
BC1
13
BA1
13
3
3
E
E
D
U
D
U
DWN
UP
B
B
DWN
UP
4
L
G–
Y
L–
O
L–
Y
L
G–
R
1
6
1
6
L
G–
Y
L–
O
L–
Y
L
G–
R
L
G–
Y
L
G–
R
RRD
RRU
RLD
RLU
A
A
19
20
C
26
C
25
BC1
5
BC1
4
BC1
1
G
R
G
R
5
5
4
BA1
5
BA1
4
BA1
1
1
2
M
M
1
2
2
2
R
L–
Y
L–
O
R–G(
∗
2)
LG(
∗
4)
21 B
PWS
B 2
W–B(
∗
1)
R–Y(
∗
5)
Y–R(
∗
2)
W–B
W–B
BR
B–R
B
11
C 8
22 B
MM
W–B
R–
G
G
L–
Y
L
3
2
1
Y(
∗
4)
LG(
∗
4)
W–B(
∗
1)
(
∗
2
)
D2
4
R–Y(
∗
5)
R–W(
∗
3)
R–W(
∗
3)
Y–R
BR
B–R
W–B(
∗
4)
R–
L
PW
R NO
. 4
Fus
e
<
4
–
2
>
PW
R NO
. 3
Fus
e
<
4
–
2
>
A
A
J28
3
B
a
ck Door
P
o
w
e
r W
indow
C
ontr
o
l S
W
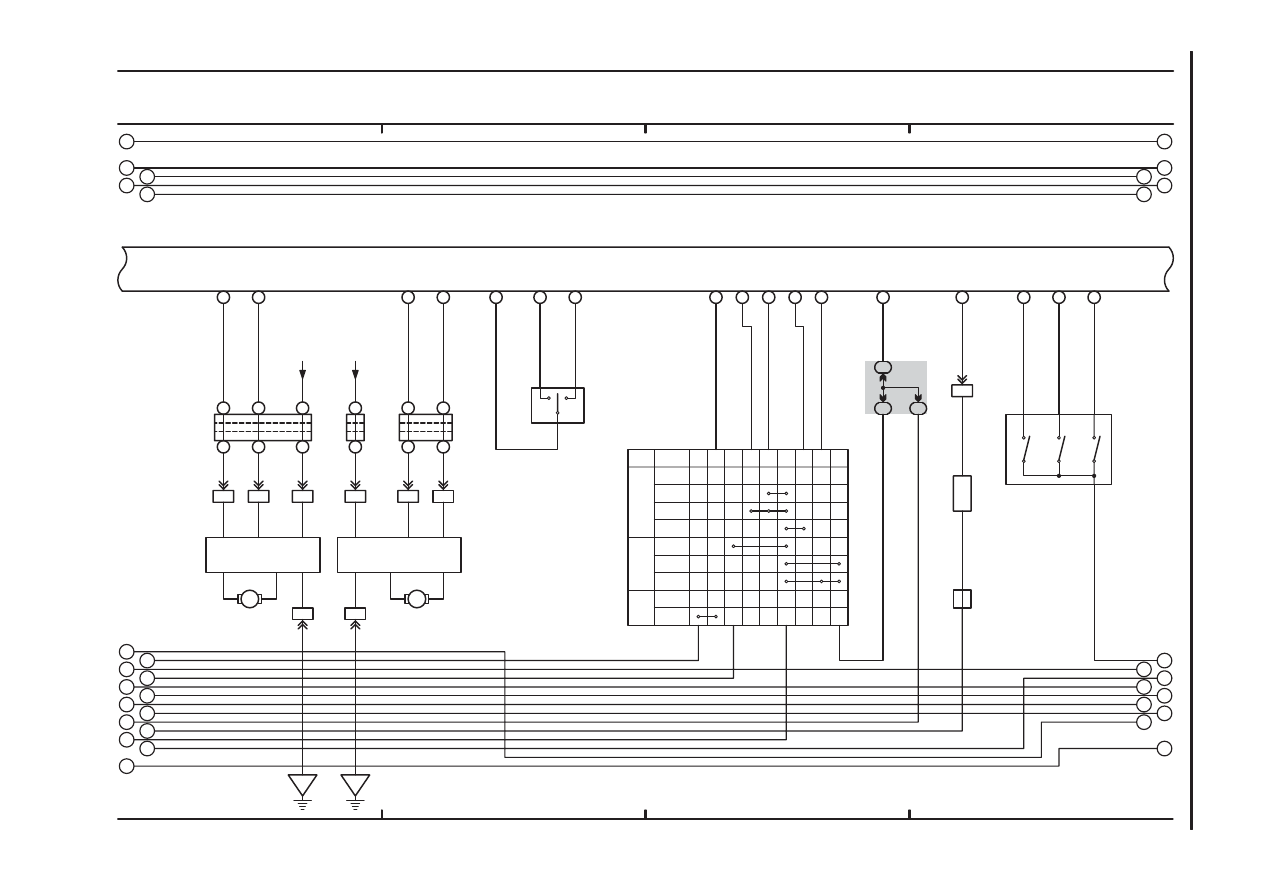
Body ECU
C
o
m
b
inati
on S
W
Junction
Connector
Juncti
on
C
onnector
Juncti
on
C
onnector
Juncti
on
C
onnector
P
o
w
e
r W
indow
C
ontr
o
l S
W
R
ear
L
H
P
o
w
e
r W
indow
C
ontr
o
l S
W
R
ear
R
H
Power Window
Motor Rear LH
Power Window
Motor Rear RH
W
ire
le
ss D
oor
L
o
ck
C
ontr
o
l B
u
zzer
D
riv
ing P
o
si
tion M
e
m
o
ry
S
W
(
∗
4
)
(
∗
4
)
(
∗
4
)
(
∗
4
)
SET
1
2
MRY
M1
M2
E
(
∗
3
)
∗
3 : w/ Front Fog Light
∗
5 : w/ Glass Breakage Sensor
∗
4 : w/ Driving Position Memory
W–R
W–R
R–G(
∗
2)
W–R
B–R
R–L
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
A
B
C
D
E
F
G
H
I
J
K
L
M
N
SEQUOIA (EM00Z0U)
358
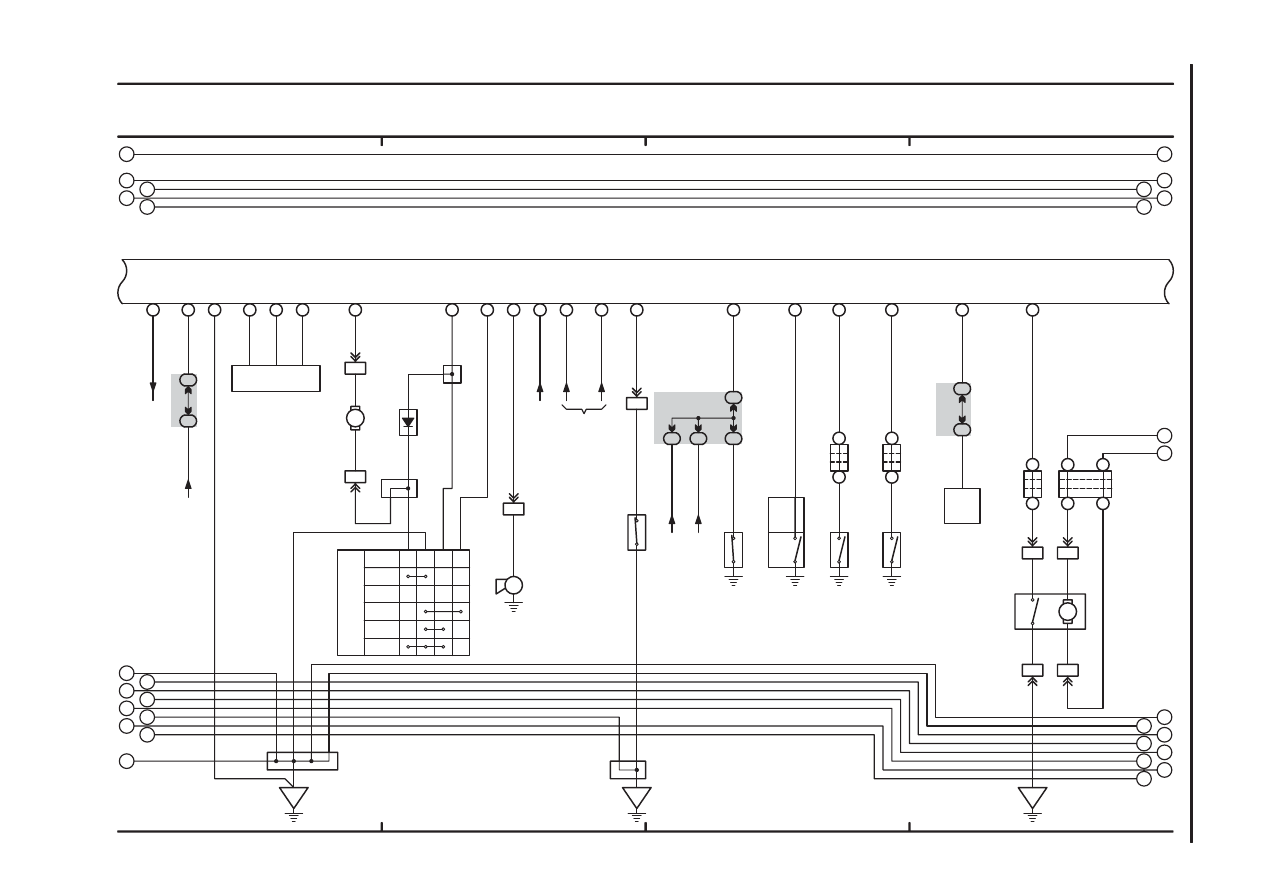
M OVERALL ELECTRICAL WIRING DIAGRAM
17
20
19
18
(Cont. next page)
(
∗
7
)
J29
(A
), J
3
0
(B
)
C1
0
S
u
spensi
on C
ontr
o
l E
C
U
<1
7
–
3
>
R
ACTY
R
adi
o and P
layer
wi
th
Di
sp
la
y<
24–
6>
LG–
R
20
13 C
DCY2
W–B
2
A
A
LG(
∗
4)
A
BR
W–B
A
4 SEQUOIA (Cont' d)
∗
7 : w/ Navigation System
M u ltip le x C o m m u n ic a tio n S y s te m (B E A N )
W–B(
∗
4)
1B
7 1A
3
SH
C
1
RWC1
A
7
6 A
RWLS
4 C
RWW
15 A
KSW2
CLTE
B
3
4 B
CLTB
CLTS
B
12
16 B
GSW
OBD2
A
A
INT
ON
Wash2
Y–
B
G–
B
10
12
13
10 IA1
1
2
M
25
IL1
IA1
14
IE
Cowl Side Panel LH
A
6 B
14 C
2
1
20 IA1
EA
Radiator Side
Support RH
GND1
HCTY
4
1
3
B–R
R–Y(
∗
5)
Y(
∗
4)
R
G–
R
GR
–
R
B
Y
R–
G
BR
Y–
G
G–
B
G
–
B
L–
O
Y–
B
G–
B
R–
G
W–B
L–
W
L
–
W
W
–
B
A
irbag S
ensor
As
se
m
b
ly
<
14–
3>
R–
G
Y(
∗
4)
W–B
A
OFF
Wash1
L–
O
1
6
1
1
3
26 A
A
22 A
12 C
L
G
–R
L
G
–R
B–
Y
LG–
B
GR
–
R
LG–
B
GR
–
R
Ho
rn
PKB
HORN
PCTY
DCTY
(
∗
8
)
1G
9 1M
12
20 C
MPX3
2
G–
O
G
–
O
MPX1
(
∗
8
)
1
D
a
ta L
ink C
onnector
3
<3
–
4
>
Tr
ansl
a
te E
C
U
<1
5
–
7
>
+1R C1R
EW
WR
(
∗
6
)
(
∗
6
)
∗
4 : w/ Driving Position Memory
LG–
R
(
∗
6
)
∗
1 : w/ Daytime Running Light
4C
4
4D
4
4B
4
N A
G B
B
N
A
G
4A
GR
–
L
S19
W–B
L–
R
J33
(A
), J
3
4
(B
)
B
C
A
I
E A
L B
B
D
A
J
W–B
L–R
L–
R
W–B
L–
B
P–
L
L–
B
P–
L
P–
L
9 BA1
2 BA1
M
BA1
10 BA1
24 C
3
3
1
4
2
LSWL
Center Pillar LH
BH
L–R
L–B
B 5(A), B 6(B), B 7(C)
R
ear
W
iper
and
W
a
sher
S
W
A27
T 1
R 1
P 2
C 9
D1
5
D1
4
J29
(A
), J
3
0
(B
)
J44
(A
), J
4
5
(B
)
E 3
D1
8
J 8
J 1
BR
B–R
4
B
R
R–Y(
∗
5)
W–B(
∗
1)
LG(
∗
4)
(
∗
9
)
∗
2 : w/o Daytime Running Light
∗
6 : w/ Automatic Light Control
∗
8 : w/ Sliding Roof
W–B
W–B
W–B(
∗
1)
W–B
Automatic Light
Control Sensor
Body ECU
C
o
m
b
inati
on S
W
C
o
m
b
inati
on S
W
D
oor
C
our
tesy S
W
Fr
ont L
H
D
oor
C
our
tesy S
W
Fr
ont R
H
D
oor
L
o
ck M
o
tor
R
ear
L
H
D
oor
U
n
lo
ck D
e
tecti
on S
W
R
ear
L
H
E
ngi
ne H
ood C
our
tesy S
W
Junction Connector
Junction Connector
Juncti
on
C
onnector
Juncti
on
C
onnector
Juncti
on
C
onnector
Juncti
on
C
onnector
P
a
rk
ing B
rake S
W
R
ear
W
a
sher
M
o
tor
Sliding Roof
Control ECU
T
heft D
e
ter
rent
Ho
rn
CLTS
CLTB
CLTE
Tr
ansponder
K
e
y
C
o
m
puter
<
3
–
2
3
>
∗
5 : w/ Glass Breakage Sensor
A
A
J16
Juncti
on C
onnector
2
1
C
J16
Juncti
on
C
onnector
C
C
L–
O
L–
O
D2
5
D
iode
(R
ear
W
a
sher
)
A
Y–
B
∗
9 : w/ Electric Modulated Air Suspension
2
Sp
ira
l
C
abl
e
W–R
W–R
B–R
R–G(
∗
2)
W–R
R–L
R–G(
∗
2)
B–R
R–L
W–R
A
B
C
D
E
F
G
H
I
J
K
L
M
N
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
SEQUOIA (EM00Z0U)
359
M
21
24
23
22
(Cont. next page)
A
C
C
LG(
∗
4)
IN1
Y(
∗
4)
W–B
I17
D1
7
J21
BR
D1
3
J44
(A
), J
4
5
(B
)
D1
2
D 8
D1
6
D 9
G 4
G 5
J43
D1
9
U 1
W 2
J10
(A
), J
1
1
(B
)
J44
(A
), J
4
5
(B
)
GND
MIC
W–R(
∗
5)
O
W–R
R–
Y
O
(S
h
ie
lded
)
B
GB+B
GBIG
GND
MI–
MI+
GBSI
1
8
6
A
5
4
4
3
P
L–B
L–R
J48
(A
), J
4
9
(B
)
A
L
B
F
6 3A
6 3D
16 3A
D A
K B
J A
C B
O
Cowl Side Panel RH
IG
A
A
A
9
DOP
A
3
M A
F B
B
N
A
G
B
K
A
D
∗
4 : w/ Driving Position Memory
+B
E
PRG
RDA
R
R
W
B–
O
R–
W
R–Y
R
R–
W
R–
Y
R
R
R
R
R
R
R
R
B–
O
W–R
O
O
R–Y
R–
Y
R–
W
R–
W
Y–
G
R–
G
V
W–B
W–B
L–
B
L–
R
L–
R
L–
B
L–
B
L–
R
L–
R
P–
B
L–
R
P–
B
L–
R
L–
B
P–
B
L–
R
L–
R
L–
R
L–
B
RRCY
RLCY
2
2
1
3
1
3
R
A
R
R
L–B
L–R
L–R
W–R
W
3C
6
8 1E
J29
(A
), J
3
0
(B
)
A
A
1
2
6 1M
14 1G
5 1J
B
B–R
1 A
10 A
E B
E B
E B
A A
D A
D A
13
II2
12
II2
10 IB1
5
1
A
M
10 BC1
2 BC1
9 BC1
B 5(A), B 6(B), B 7(C)
3 BC1
BK
Center Pillar RH
L–
B
4
2
B
3
1
ACT–
ACT+
21 A
5 A
4 A
13 A
2
1
3
2
PRG
LSWR
RDA
KSW
7 BA1
7 C
1
2
6 BA1
1
1
BC1
6
2
1
A
8
BC1
7
W–B
2
M u ltip le x C o m m u n ic a tio n S y s te m (B E A N )
4 SEQUOIA (Cont' d)
R
Y(
∗
4)
R–Y(
∗
5)
B–R
W–B
BR
LG(
∗
4)
W–B
∗
2 : w/o Daytime Running Light
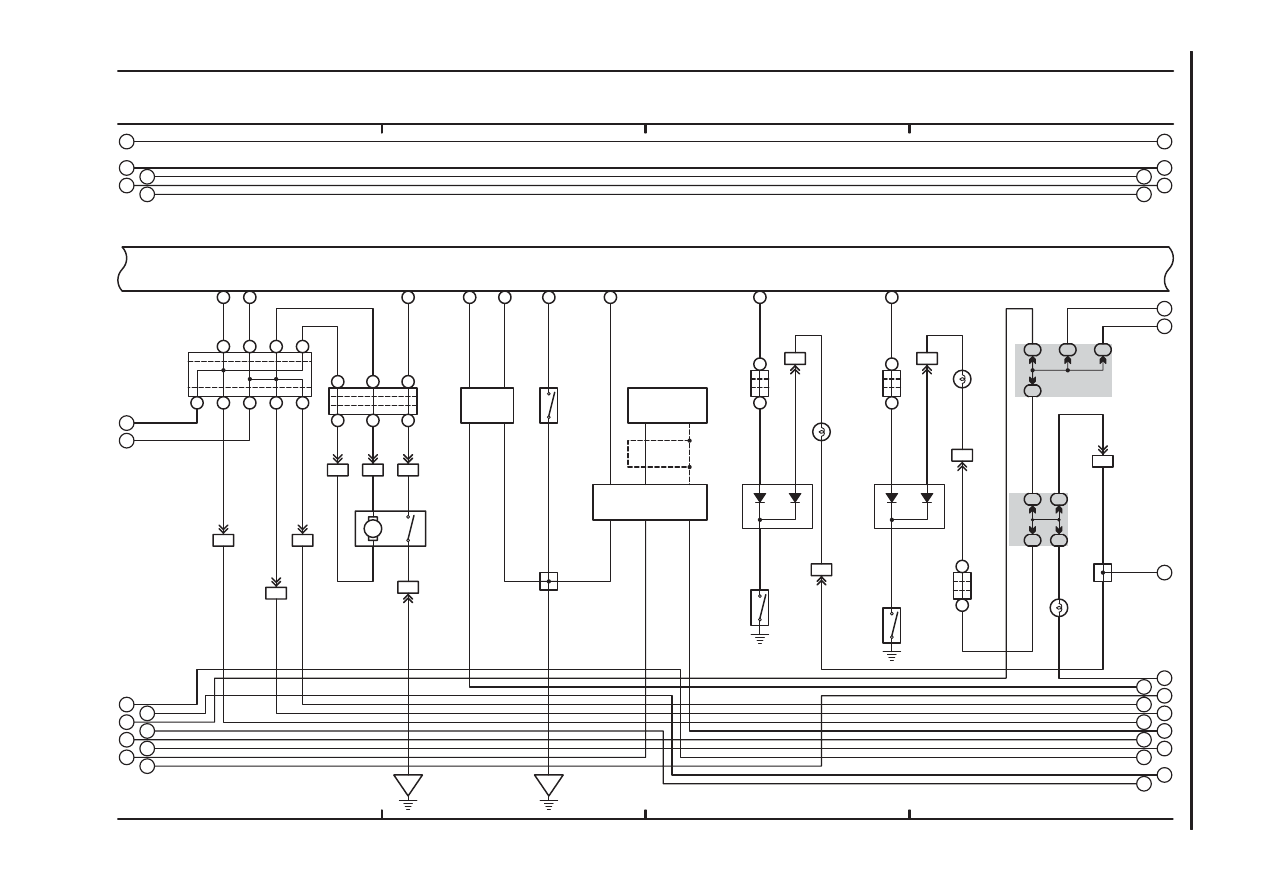
Body ECU
D
iode
(Inter
ior
L
ight N
o
. 1
)
D
iode
(Inter
ior
L
ight N
o
. 2
)
D
oor
C
our
tesy L
ight
R
ear
L
H
D
oor
C
our
tesy L
ight
R
ear
R
H
D
oor
C
our
tesy S
W
R
ear
L
H
D
oor
C
our
tesy S
W
R
ear
R
H
D
oor
L
o
ck M
o
tor
R
ear
R
H
D
oor
U
n
lo
ck D
e
tecti
on S
W
R
ear
R
H
G
lass B
reakage
S
ensor
E
C
U
Glass Breakage
Sensor Microphone
Igni
tion K
e
y
C
yli
nder
L
ight
Juncti
on
C
onnector
Junction
Connector
Juncti
on
C
onnector
Junction
Connector
Juncti
on
C
onnector
Juncti
on
C
onnector
Juncti
on
C
onnector
Unl
o
ck W
a
rni
ng S
W
W
ire
le
ss D
oor
C
ontr
o
l R
e
cei
ver
(
∗
5)
(
∗
5
)
(
∗
5
)
(
∗
5
)
(
∗
5
)
(
∗
5
)
(
∗
5
)
∗
5 : w/ Glass Breakage Sensor
W–R
W–R
R–L
W–R
R–G(
∗
2)
B–R
R–L
W–R
B–R
R–G(
∗
2)
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст