Toyota Highlander (2018 year). Manual — part 78
324
4-5. Using the driving support systems
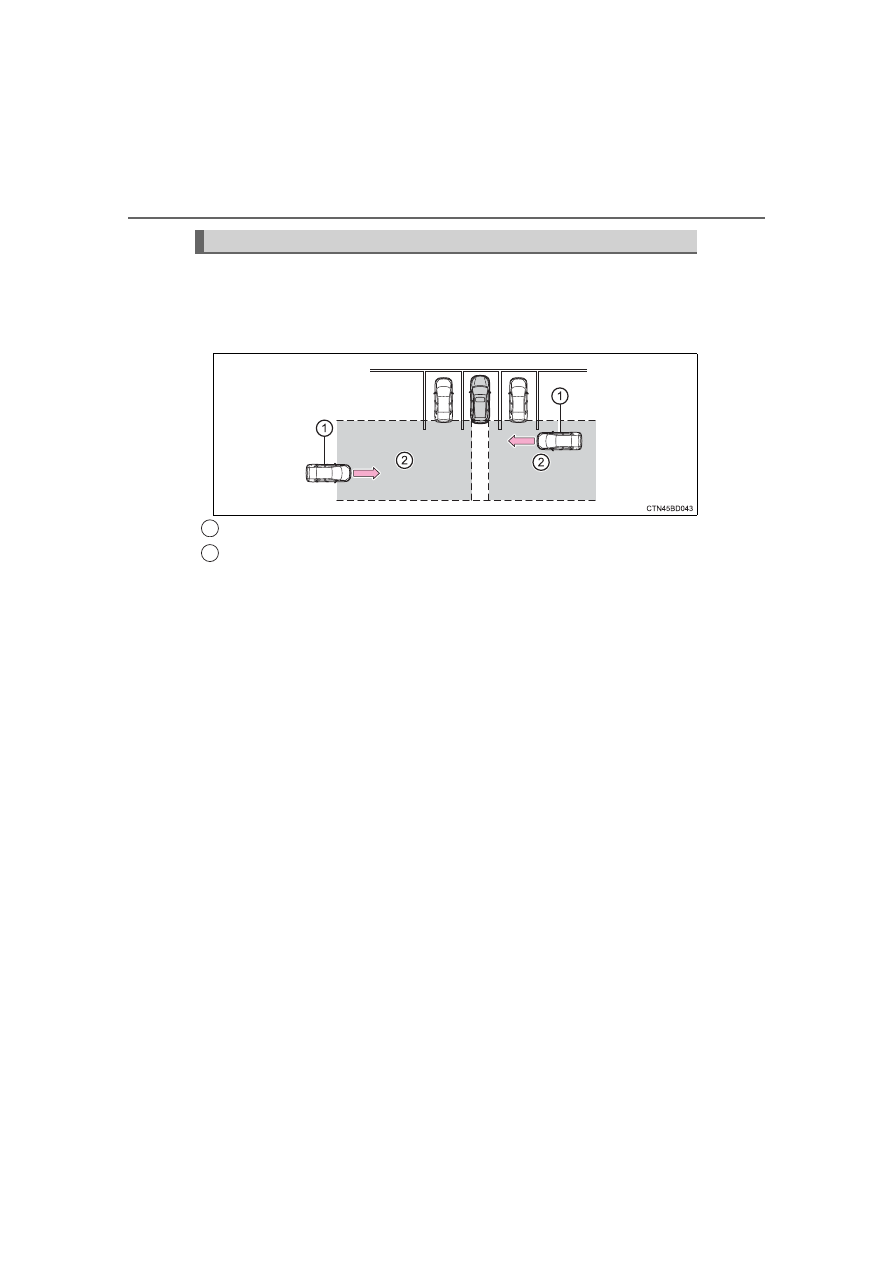
The RCTA function uses radar sensors to detect vehicles approaching
from the right or left at the rear of the vehicle and alerts the driver of
the presence of such vehicles by flashing the outside rear view mirror
indicators and sounding a buzzer.
Approaching vehicles
Detection areas of approaching vehicles
RCTA function
1
2
325
4-5. Using the driving support systems
4
Drivin
g
■
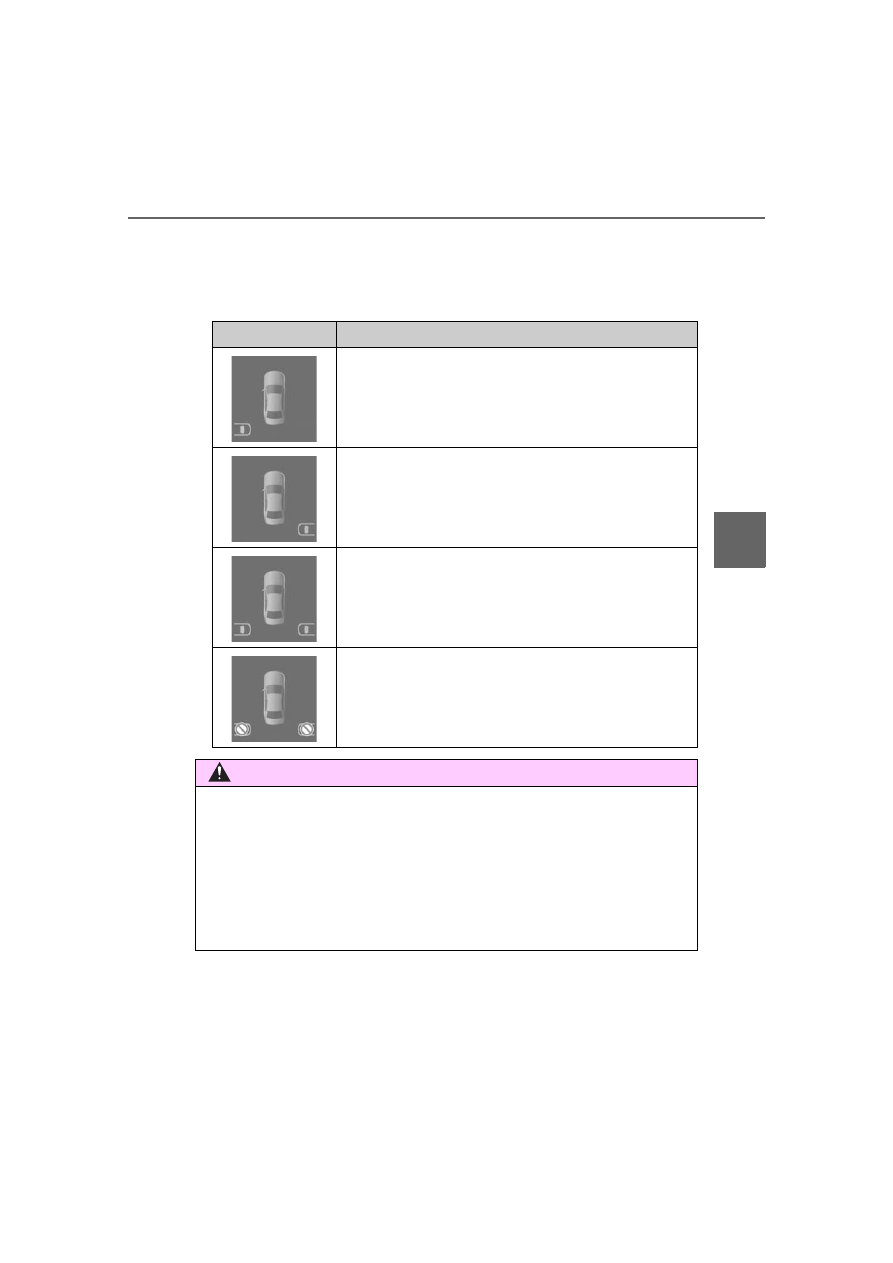
RCTA icon display
When a vehicle approaching from the right or left at the rear of the
vehicle is detected, the following will be displayed on the audio sys-
tem screen.
Display
Content
A vehicle is approaching from the left at the rear of the
vehicle
A vehicle is approaching from the right at the rear of the
vehicle
Vehicles are approaching from both sides of the vehicle
The RCTA function is malfunctioning (
WARNING
■
Cautions regarding the use of the function
The driver is solely responsible for safe driving. Always drive safely, taking
care to observe your surroundings.
The RCTA function is only a supplementary function which alerts the driver
that a vehicle is approaching from the right or left at the rear of the vehicle.
As the RCTA function may not function correctly under certain conditions,
the driver’s own visual confirmation of safety is necessary. Over reliance on
this function may lead to an accident resulting death or serious injury.
326
4-5. Using the driving support systems
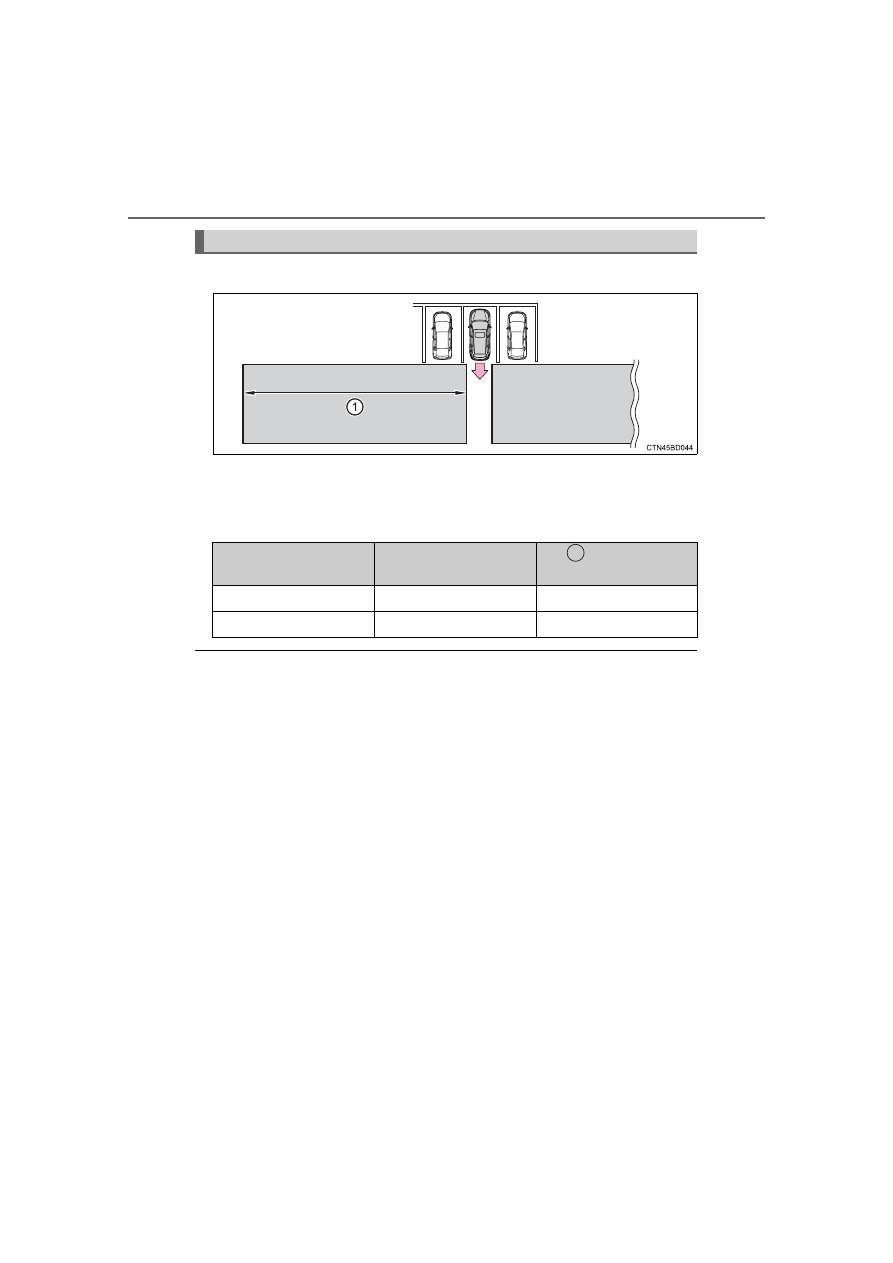
The areas that vehicles can be detected in are outlined below.
The buzzer can alert the driver of faster vehicles approaching from
farther away.
Example:
■
The RCTA function is operational when
The RCTA function operates when all of the following conditions are met:
●
The RCTA function is on.
●
The shift lever is in R.
●
The vehicle speed is less than approximately 5 mph (8 km/h).
●
The approaching vehicle speed is between approximately 5 mph (8 km/h)
and 18 mph (28 km/h).
RCTA function detection areas
Approaching vehicle
Speed
Approximate
alert distance
Fast
18 mph (28 km/h)
65 ft. (20 m)
Slow
5 mph (8 km/h)
18 ft. (5.5 m)
1
327
4-5. Using the driving support systems
4
Drivin
g
■
Conditions under which the RCTA function will not detect a vehicle
The RCTA function is not designed to detect the following types of vehicles
and/or objects:
●
Vehicles approaching from directly behind
●
Vehicles backing up in a parking space next to your vehicle
●
Guardrails, walls, signs, parked vehicles and similar stationary objects
*
●
Small motorcycles, bicycles, pedestrians, etc.
*
●
Vehicles moving away from your vehicle
●
Vehicles approaching from the parking spaces next to your vehicle
*
*
: Depending on the conditions, detection of a vehicle and/or object may
occur.
■
Conditions under which the RCTA function may not function correctly
●
The RCTA function may not detect vehicles correctly in the following situa-
tions:
• When the sensor is misaligned due to a strong impact to the sensor or its
surrounding area
• When mud, snow, ice, a sticker, etc. is covering the sensor or surround-
ing area on the rear bumper
• When driving on a road surface that is wet with standing water during bad
weather, such as heavy rain, snow, or fog
• When multiple vehicles are approaching with only a small gap between
each vehicle
• When a vehicle is approaching at high speed
• When towing a trailer
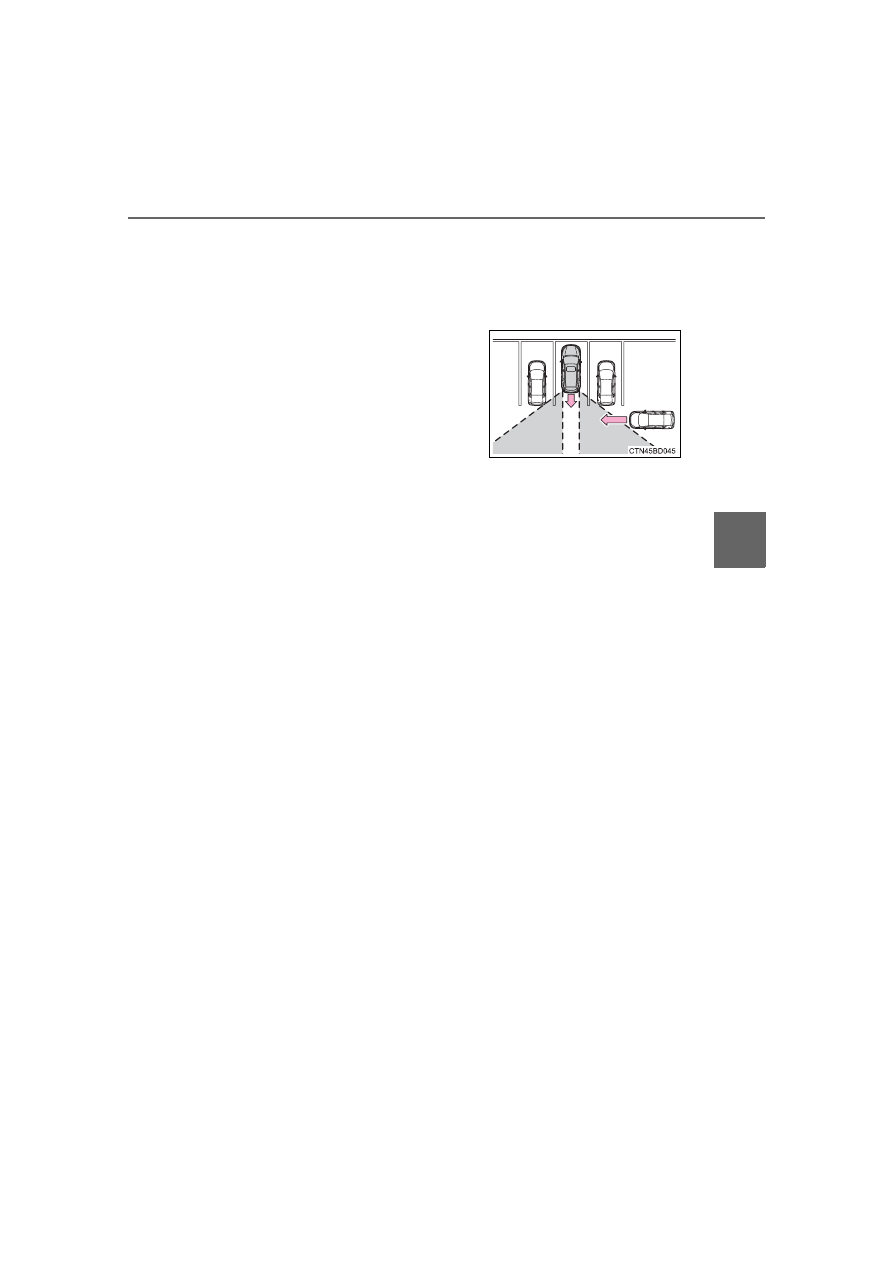
●
Vehicles that the sensors cannot detect
due to obstructions
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст