JAC S5. Руководство — часть 230
S5 Service manual
S5 Инструкция по техобслуживанию
Body Control Module
Блок Управления Кузовными Электронными Системами
BCM-29
ACTIVE
АКТИВНЫЙ
ACTIVE
АКТИВНЫЙ
INACTIVE
НЕАКТИВНЫЙ
Error
Ошибка
ACTIVE
АКТИВНЫЙ
ACTIVE
АКТИВНЫЙ
ACTIVE
АКТИВНЫЙ
ON
ВКЛ
Status judgment for key insertion signal
Сигнал определения состояния вставки ключа зажигания
Key insertion switch
Замок вставки ключа зажигания
Key insertion signal
Сигнал вставки ключа
ACTIVE
АКТИВНЫЙ
IN
ВСТАВЛЕН
INACTIVE
НЕАКТИВНЫЙ
OUT
НЕ ВСТАВЛЕН
20. Anti-clamp motor control
20. Управление двигателем в случае заклинивания
Through LIN bus, follow LIN2.0 protocol, take BCM as the host node, and use the first LIN.
При помощи шины LIN, протокола LIN 2.0, ВСМ выполняет роль ведущего узла. Вначале исполь-
зуется LIN.
This feature is not available for the foundation, only for standard and luxurious models, where smart
configuration is required for anti-clamp motor.
Эта особенность отсутствует в базовой комплектации, но имеется только в моделях “люкс”, где
требуется интеллектуальная конфигурация для предупреждения заклинивания двигателя.
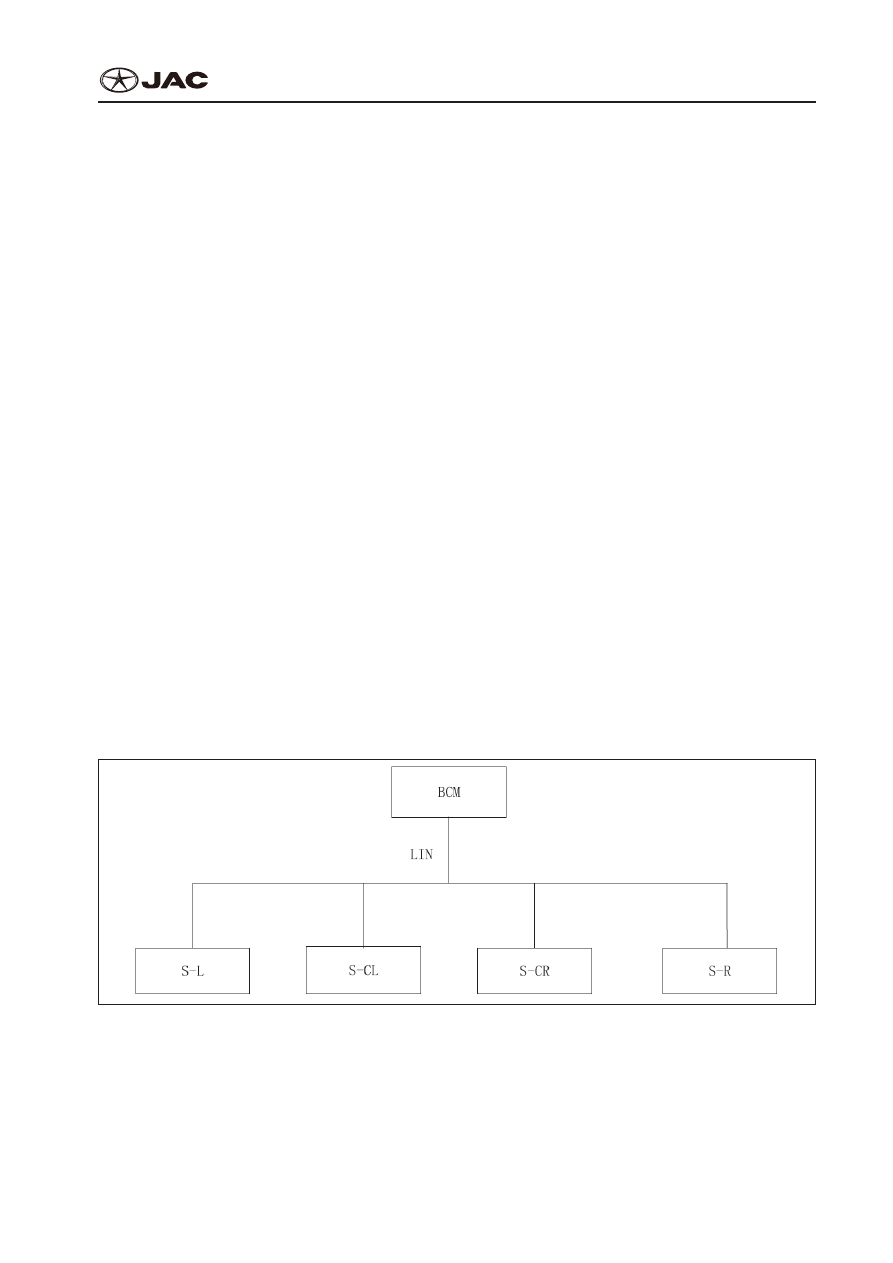
21. Parking Sensor Alarm Control
21. Управление сигнализацией парковочного датчика
Through LIN bus, take BCM as the host node, LIN connection block diagram shown below:
ВСМ становится ведущим узлом при помощи шины LIN. Блок-схема соединения LIN показана
ниже:
The buzzer frequency of 4 probes is collected first and it is considered invalid when the distance be-
tween right and left probes ≥60cm, so the buzzing signal will not be taken, or otherwise it is considered
effective and buzzing will start for the probe which shows the highest buzzer frequency; When the
buzzer frequency for the last probe is received, the first distance will be discarded and comparison will
be made between the 2nd to the 4th probe, as a result, buzzing will sound for the one considered hav-
ing the highest buzzer frequency and so on.
Частота зуммера 4 датчиков вначале собирается, рассматривается неверной, если расстояние
BCM-30
S5 Service manual
S5 Инструкция по техобслуживанию
Body Control Module
Блок Управления Кузовными Электронными Системами
между правым и левым датчиком составляет ≥60см. Сигнал зуммера не принимается. Зумми-
рование принимается от того датчика, который подает сигнал с наибольшей частотой. По по-
лучению частоты зуммирования от последнего датчика сначала расстояние не учитывается,
производится сравнение между вторым и четвертым датчиками. В результате примется сигнал с
наибольшей частотой зуммирования и т.д.

S5 Service manual
S5 Инструкция по техобслуживанию
Body Control Module
Блок Управления Кузовными Электронными Системами
BCM-31
Replace BCM Control Module
Замена Модуля Управления ВСМ
1. Disassembly
1. Демонтаж
1) Disconnect the negative pole of battery;
1) Отсоедините отрицательную клемму аккумуля-
тора.
2) Remove the instrument panel (see “Disassemble
the instrument desk”);
2) Демонтируйте приборную панель (см. раздел
“Демонтаж приборной панели”);
3) Screw off the three tightening nuts for BCM;
3) Открутите три гайки затягивания BCM;
4) Disconnect BCM wiring harness connector;
4) Отсоедините соединитель жгута проводки
BCM;

BCM-32
S5 Service manual
S5 Инструкция по техобслуживанию
Body Control Module
Блок Управления Кузовными Электронными Системами
5) Remove BCM control module
5) Снимите модульный блок BCM
2. Installation
2. Установка
Assemble it in reverse sequence as did in disassembly
Установка производится в обратной последовательности к демонтажу.
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст